Book.
The Discus Thrower and his Dream Factory
Chapter 14. The Ariel Computerized Exercise Machine System
I have discussed previously my association with the Universal Gym Exercise Company. I was involved with them for about 8 years and helped to design the most advanced exercise system of the time. However, the designs were for equipment constructed of metal with cams to provide resistance that varied throughout the exercise movement. This was an appropriate type of exercise equipment for a gym, school, or athletic setting which could be used by many people continuously all day long. Many of the people who trained on this type of equipment were young and, frequently, insensitive or uncaring about the wear and tear on the systems. For this reason, the equipment had to be rugged and able to sustain the stress and abuse of the exercising public. The Universal Gym equipment was designed specifically for this marketplace and the type of exercise users who, in general, were indelicate when working out on the equipment. (See Appendix 1).
For its time and place in the world of exercise, the Universal Gym equipment, which employed the dynamic variable resistance (DVR) system, was the best training device available. However, there were some limitations even for this advanced system. For one thing, the cam provided only a fixed pattern of adjustment. However, if you wanted to change the form of the exercise, you were unable to make any alteration. You could not swap different cam shapes into and out of the equipment if you wanted to follow a different movement path. Another limitation was the inability to accelerate at the end of the exercise movement. You could not because of the rigid and inflexibility in the hardware. If you wanted an isometric contraction at the midpoint of the exercise, it was impossible for the cam to provide this option.
The Universal Gym Equipment with DVR (Dynamic Variable Resistance)
The Universal DVR machines were fantastic in the 1970s and are still providing superb exercise into the 21st Century. But I was sure that could be better and smarter machines which could provide improved exercise benefits. I had not found any but in my mind, I was confident that I could create something that would fill the void. I concluded that I would have to invent something. Ever the optimist and with dogged determination, I pondered and considered a number of ideas that might work.
One possibility would be to use air in closed cylinders to provide resistance. However, there were problems with using air: (1) the amount of pressure could not be regulated or calibrated; (2) the system would have to be pressurized at all times; (3) pressurizing the system which would require electrical connections; and (4) air can only be compressed. What if there were leaks in the cylinders or the pressurized lines which delivered the air? What would happen during an electrical failure? How would you provide for each movement direction? Since air cannot be stretched, there would have be two cylinders for an exercise such as a bicep extension-flexion exercise.
I reconsidered another proven system to provide exercise that provided increased and decreased forces throughout the exercise movement. These were “stretchy” devices like the ones I had developed during my brief time at Indiana University in Bloomington. When I was a student and the assistant track coach at Indiana University, I had taken several different lengths of surgical tubing from the medical school, attached handles at one end and fixed the other end to the wall. These simple tubes were unbelievably fantastic for three dimensional joint movements and the more the tube was stretched, the greater the resistance to the muscle. In addition, they were light and easily portable. Unfortunately, they could not be calibrated so the person exercising had no idea how much force he or she was exerting.

Surgical Tubing as Exercise Device (I first came with this idea in 1968)
One day during my regular exercise routine, I was raising and lowering a barbell in a bicep curl. It was very easy to lift the weight at the beginning of the exercise when my arm was down with the barbell in my hand. However, as I bent my elbow the weight was increasing more difficult to lift until after I had passed the halfway point with my elbow at ninety degrees. As I continued the curl, the weight again seemed easier to lift as the hand and weight approached my shoulder. The same problem occurred in reverse as I lowered the barbell.
I concluded that what I really needed was a little magic “genie” to add and remove weight from a bar, such as the barbell, while the exercise was in progress. I imagined that there was a little magic “genie” who could add weights incrementally when it was easy for me and remove weights when I struggled to raise the bar. In other words, the “genie” could add or remove some of the load during the exercise so that the load adjustments would be fine-tuned to the person performing the exercise. My “eureka” moment occurred as I realized that I needed the exercise device to adjust to the person rather than the person having to adjust to the equipment.
These thoughts whirled around in my head. I had long ago recognized the limitations of traditional equipment. I had perceived a way to improve on exercising. Now I had to find a way to make the equipment smart enough to adapt to the individual. This would take more time and brainpower to solve. I had to find a solution to adjust to the continuous changes between levers (bones) and the load so that exercise is optimized, as well as a method for regulating and recording these adjustments. I needed to invent a system with a brain.
At that time, all of the existing resistive training equipment were merely "tools" which lacked intelligence. The equipment was "unaware" that a subject was performing an exercise on it. The human brain can sense touch, see objects in motion, determine smells, tastes, and sounds and act according to the sensory inputs. No exercise hardware could function like a human because none had “brains”. How could I give an exercise device this “thinking” capability?
My initial thinking led me to the consideration of the human body’s use of closed loop feedback and sensory capabilities. This neurological and muscular system provides people with the ability to execute large and fine motor skills. Much of the control was at a subconscious level such as breathing, walking across the room, and chewing food. Other tasks necessitated great cerebral attention such as running down a runway for the pole vault in track and field or manipulating the dials on an electronic device. These capabilities did not exist on any fitness training equipment.
Human-Computer Interface
However, as I pondered the idea of an exercise machine that could have a “brain” and “closed loop feedback” abilities, I naturally turned to the newly developing world of computers. With the advent of miniaturized electronics in computers, perhaps it would be possible to connect an exercise device to the computer's artificial intelligence. If I could find a way to combine hardware and computerized software then the equipment could adjust and adapt to the exerciser. At last, this would be the ultimate exercise device. Now, the task was to create this “smart” exercise system.
I thought about what currently existed among the many exercise devices available. I rejected air, springs, and stretchy surgical tubing since there were difficult to control. I remembered a small hydraulic exercise system that we had in our Amherst office which was a prototype for a Universal Gym Equipment product.
Ed Burke, the American Olympian hammer thrower, and I worked on this machine years before at Universal. That project had been cancelled long ago but the hardware was in the back of our office.
The Universal hydraulic machine
Ann and I pulled the cobweb covered machine into the middle of the room. We cleaned it off and then examined the structure and component parts. The exercise bar and handles were fixed to a small post. Also attached to the post was a small hydraulic cylinder with a small handle for opening and closing the valve. We turned the handle to open the hydraulic cylinder valve and then moved the bar up and down. The movement was relatively smooth and it was easy to move the valve control dial. However, when I closed the valve on the cylinder as the bar was raised or lower, it was more difficult to move the bar.
“This is perfect for beginning the exercise machine with a brain” I exclaimed in a surprised and happy manner while Ann smiled in her understanding, supportive way. “Hydraulic cylinders have valves that can be regulated. In addition, the materials are easy and inexpensive to acquire and the “oil” can be anything from hydraulic fluid to maple syrup! The “oil” can be contained, cylinders valves can be regulated, and these components can be controlled with computer software. My brain was on fire with ideas. I felt as though there were fireworks exploding out into the room around me but as I looked around the office, everyone was working quietly and normally.
I was always enthusiastic about ideas so naturally I wanted the World to know about this concept. In 1975, I submitted an abstract for the “Computerized Dynamic Resistive Exercise” which I subsequently presented in 1976 at the International Conference of the Montreal Olympics in Canada (see Appendix 2). Now, we had to transform this idea into a tangible system.
My original concept of the Computer control Exercise Machine
I called the entire staff to consider my ideas with regard to actually implementing them. At that time, we had a programmer, Alan Blitzblau, who was a genius with software programs. Independently, Ann and I had met Alan when he was working in the computer science department. We each had sought his help at the computer center and had become quite friendly. Ann use to “pay” Alan by baking pecan pies since she did not have enough money to actually pay for his help. The three of us frequently had lunch together at a local sandwich shop where Alan and I would play one of the first video games, Pac man!! After we moved our CBA office from Dartmouth College to Amherst and then grew large enough to need a full-time, in-house programmer, we hired Alan.


One of our first programmers, Alan Blitzblau, demonstrating the World’s first Motion Capture program created in CBA in 1972
Alan and Ann thought the idea of programming a computer to control an exercise machine was fantastic and clearly a problem that we could solve together. Alan had worked with two students in the engineering department, Justin Millium and Peter Smart, who had complementary talents with regard to electronic controls and computer systems. He was tasked to finding them and getting them to our office. Alan was confident that he, Peter, and Justin would be able to program the computer, hardwire any components onto computer control boards, and interface all of these separate devices so that they could operate successfully.
At that time, the only computers commonly available were the main frame computers such as the Honeywell at Dartmouth College and Control Data at the University of Massachusetts. The systems were powerful and could handle many users at a time but with sizes that filled hundreds of feet of floor space, they were inappropriate for our needs.
Our world of computers was about to explode into a whole new and vast experience. In one of our first meetings with Peter and Justin, we were introduced to a whole new world of electronics. Peter and Justin described a single chip microprocessor which had been introduced in November, 1971 by a company called Intel. This revolutionary microprocessor was the size of a little fingernail yet could deliver the same computing power as the first electronic computer built in 1946 which filled an entire room. The 1971 Intel 4004 processor held 2300 transistors and was produced on two-inch wafers compared to the 12-inch wafers commonly used for today’s products. The Intel 4004 microprocessor is unique in that it is one of the smallest microprocessor designs that ever went into commercial production. After the invention of integrated circuits revolutionized computer design, the next step was to make things smaller and the Intel 4004 chip moved the integrated circuit down another step by placing all the parts that allowed a computer to “think”, i.e. central processing unit, memory, input and output controls, on one small chip. Fortunately, for CBA and my quest for an exercise machine with brains, this Intel microprocessor was a miracle solution for our needs. We needed computing power that did not fill half of a university building and this little tiny electronic wafer seemed to be exactly what was required.
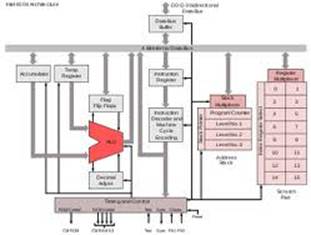
The Intel 4004 which we used in our first designed microcomputer - 1974
Alan explained that Justin was knowledgeable in the assembly language required to program the Intel chip. Alan and Justin would be able to design the flow of information between the various components and the microprocessor. Peter’s contribution was the ability to design and build the circuits to connect all of the interfacing components of the exercise machine’s brain, sensors, and control devices.

Justin Milliun and Peter Smart

Geniuses at Work at the University of Massachusetts
Justin and Peter designed for me the first Personal Computer before Apple or Atari and way before IBM personal Computer. Here is correspondence between me and Justin recently on Facebook:
We also were lucky that Justin and Peter knew a professor at the university that they believed could be an asset to the project. Ann and I decided that it was a good idea to meet the fellow and perhaps good things could result. We told them to have him come to the office. A day or two later, we observed a skinny fellow with a huge head of hair and a beard staring up at the sign above our office door. The behavior of staring at our sign with a puzzled expression was quite common. However, this man had more of a “hippy” appearance than we ordinarily observed. Imagine our surprise, when the fellow opened the door and introduced himself as Justin and Peter’s professor. He introduced himself as Dr. Jeremy Wise. Wow, now we had “smart” and “wise” in our office!
Dr. Wise had received his baccalaureate degree in physics from Cornell and his Ph.D. in high energy physics from the University of Massachusetts. Dr. Wise had a quiet confident demeanor but more importantly he had unbelievably pertinent knowledge for CBA. Initially, I was extremely impressed with his credentials but pondered how we could successful utilize his talents. I inquired about his computer programming skills and received a modest response. I suggested that he program the stock market. He answered merely to inquire what and how much I wanted such as daily or weekly listings, all of the stocks or only what I owned, and similar questions. After we discussed the details, I assured him that I would pay for his hours and then he left the office. I looked at Ann and we both shrugged our shoulders. Neither of us was very optimistic that we would see him again. At that time, in the 1970’s, there were no computerized programs within or outside of the stock exchanges. The task we had assigned to Dr. Wise was not only a huge but was completely unheard of at that time.
Imagine our surprise, when Dr. Wise returned in two days apologizing for the delay. He had taught his class the preceding day so he had needed an extra day to complete the programming. He had a computer print of the data and the program to scan into our Data General NOVA-3 computer. Within half an hour, he had loaded, demonstrated, and explained the entire stock management package that he had programmed. We were so impressed with Dr. Wise’s talents we hired him on the spot despite the fact that we did not, as yet, know what tasks to assign to him! That was a significantly momentous day for CBA. Dr. Wise has been our programmer, colleague, and friend since that day and, hopefully, for into the distant future.


Dr. Jeremy Wise at NASA Shuttle Project, and with me

Our Data General Nova-3
The tasks were for the other staff members were set. Gideon and Ann had to find the best hydraulic cylinder and transducer while the software men proceeded with their parts. Alan and Justin began almost immediately to design the software flow charts. Peter watched their work until he had sufficient information to begin his hardware designs.
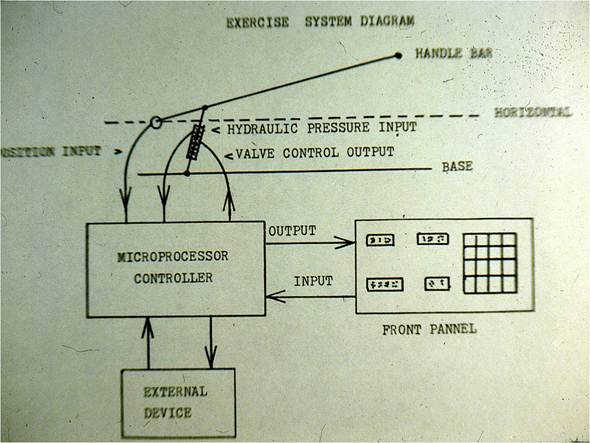
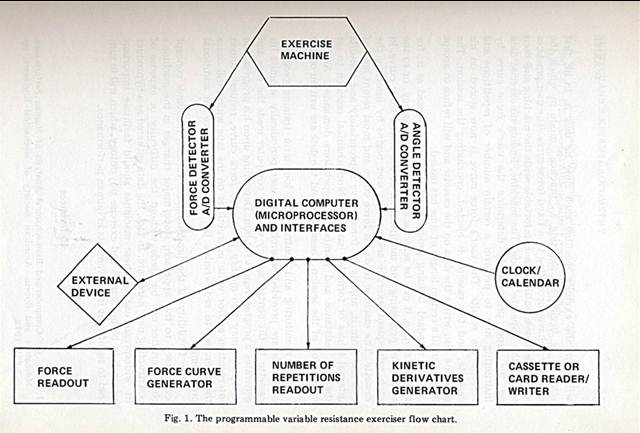
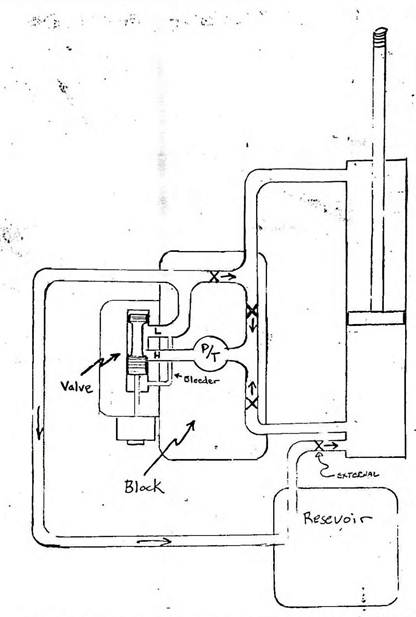
The original design idea for the Computerized Exercise Machine (CES)
During the time that all of the computerization, board building, and discovering Dr. Wise was swirling, Ann and I had set ourselves the task to learn more about hydraulic systems. We had found a hydraulic expert at the University engineering department. The professor explained that hydraulic machines use liquid fluid power to do simple work. He had described how a huge earth digging machine could serve as an example. In that type of machine, hydraulic fluid is transmitted throughout the equipment to various hydraulic motors and cylinders which becomes pressurized according to the resistance present. The fluid is controlled directly or automatically by control valves and is distributed through hoses and tubes.
The advantage of hydraulic machinery is that a large amount of power can be transferred through small tubes and flexible hoses. In other words, hydraulic machinery utilizes a pressurized liquid (hydraulic fluid) as the powering medium.
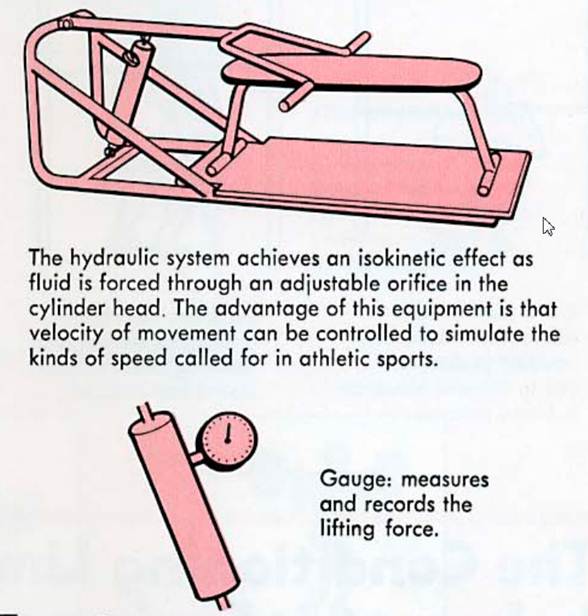
The professor explained that the only way to measure force in a hydraulic cylinder is to utilize a transducer to measure the pressure inside the cylinder. Because oil cannot be compressed, the transducer can measure the forces. The pressure transducer can be located outside of the cylinder in a manner that the oil flow passes through it in pipes from the top to the bottom of the cylinder itself. This arrangement would allow the pressure to be measured with a transducer set at a high testing rate. The higher the measurement rate, the more frequently the control valve could be opened or closed.
The first hydraulic control valve which we tried to adapt for our exercise machine was a “screw” type. This type of valve has to turn to open and close the opening through which the oil flows. The valve performed well under slow controlled bar speeds but it was not fast enough for rapid changes. The amount of time needed to spin to the most extreme positions was too extreme which caused the movement to be jerky rather than smooth. Another problem was that the pressure did not change in a linear fashion. This lack of linearity made it difficult to control. We realized that we needed a different type of valve which could respond more quickly.
The Original Computerized Exercise Machine - 1974
Ann and I returned to our friendly and helpful professor’s for help. His next suggestion was to try a hydraulic spool valve as perhaps being more appropriate for our specific needs. A hydraulic spool valve is a cylinder inside a sealed case. It usually has valves leading to the pump and the tank on one side and valves leading to one or more hydraulic devices on the other side. Pressure can flow into the valve from the pump into the hydraulic devices or drain out of them back into a hydraulic storage tank. A controller moves the valve back and forth in its case to slide the spools into different positions. The position of the rotor will only allow the hydraulic fluid to flow in one direction to perform a specific task.
Hydraulic spool valves can be used in many different ways to perform many different functions. One of the most common uses is to drive a pressurized hydraulic piston. The piston is sealed in a cylinder with a valve on either end, both leading to the spool valve. When the spool valve is set in the “push” position, fluid flows from the pump into the bottom of the cylinder while the fluid in the top of the cylinder is allowed to flow out into the hydraulic tank. This pushes the piston out. When the valve is set in the “pull” position, fluid flows into the top of the cylinder and out of the bottom causing the piston to pull back into cylinder. This seemed to be the ideal solution for our specific needs.
At that time I was enrolled in the computer sciences department at the University of Massachusetts pressuring a second Ph.D. degree. One of my professors was Dr. Wogrin. He was also the department head of Computer Sciences. In his class covering computer hardware, one of the requirements was to have a project. I asked Dr. Wogrin if I can work on my idea of Computerized Exercise Equipment and design the Hydraulic mechanism that will be controlled by the computer. He agreed. Here is the result of this effort.
My hydraulic design of the Computerized Exercise Machine in 1973 still in use
The exercise machine would have a bar with the handles at one end for the person to push or pull. The other end of the bar would be connected to the piston in the sealed hydraulic cylinder. The spool valve, under computer control, would be adjusted to open or close as required by the pressure generated by the person exercising according to the designated computer program. From that point until the oil was returned to the accumulator, it could be controlled simply with the use of various check valves.
The control mechanism for our spool valve was a stepper motor. Peter had located the first of its kind stepper motor from Eastern Devices. This was a newly developed device that was digitally controlled whereas all of the previous hydraulic motors had operated under analog control. Although it was easy for large main frame computers to control analog devices, it was very complicated to regulate and control an analog motor with the existing microelectronics. The digital stepper motor was a digital electric motor which moves a known finite distance with each pulse of electrical power applied.
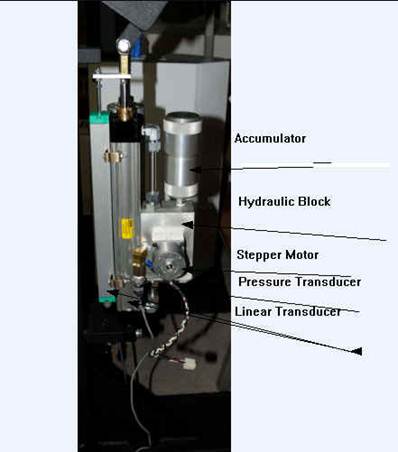
Hydraulic assembly with stepper motor from the 70’s, still used today
Stepper motors effectively have multiple “toothed” electromagnets arranged around a central gear-shaped piece of iron. The electromagnets are energized by an external control circuit, such as a microcontroller. To make the motor shaft turn, first, one electromagnet is given power, which makes the gear’s teeth magnetically attracted to the electromagnet’s teeth. When the gear’s teeth are aligned to the first electromagnet, they are slightly offset from the next electromagnet. So when the next electromagnet is turned on and the first is turned off, the gear rotates slightly to align with the next one. From that point, the process is repeated. Each of those slight rotations is called a “step”, with an integer number of steps making a full rotation. In that way, the motor can be turned by a precise angle.
Thus, movement of the spool valve could be easily controlled with electronic signals from a stepper motor. Peter and Justin were easily able to control the individual steps of the motor which allowed precise control of the spool valve. The microprocessor software could control the valve and motor so that the exercise bar could provide a person exercising with a smooth bar reaction when pushed or pulled.
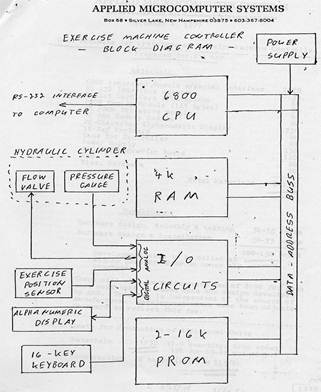
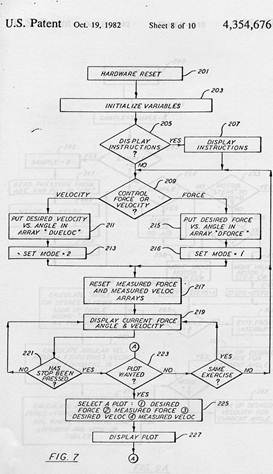
Control of the Exercise Machine original flowcharts
The valve and stepper motor operated digitally and could be controlled by the electronics. The next problem to solve was to convert the analog data generated by both the force transducer and the pressure transducer into digital data.
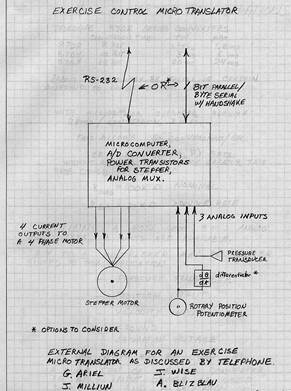
My thoughts were that we needed to have two separate inputs: force and position. We could obtain pressure from a transducer located within the hydraulic system and the bar position could be provided by an angular transducer on the bar itself. Electronic circuitry would receive the data from each of the transducers. The problem to overcome was that the signals from each of the transducers were analog rather than digital. In order for the software that Peter and Justin were creating to process and control the system, the transducer signals would have to be converted from analog to digital. Then, they could be processed by the “brain” and that information was then sent to the stepper motor control system to open or close the value.
This is analogous to the sensory-motor feedback loops within the human body was the way I described the system to our two engineers. Consider, for example, drinking water from a cup. The hand and arm must lift the cup to the mouth. The position of the arm must be constantly monitored for position and to control the action. The amount of strength provided by the muscles must be evaluated and regulated so that there is enough force to lift the cup but not so much that the cup is smashed into the mouth. There are continuous interactions between the arm/hand position and the lifting force in order for a person to drink water from a cup. The human brain must measure and regulate these actions continuously. This “feedback loop” system of direction, measurement, and control of the human body was what we were trying to duplicate in the CES. Fortunately, Peter and Justin were brilliant hardware and software engineers so they were able to understand my ideas, explanations, and then to create the product I envisioned.
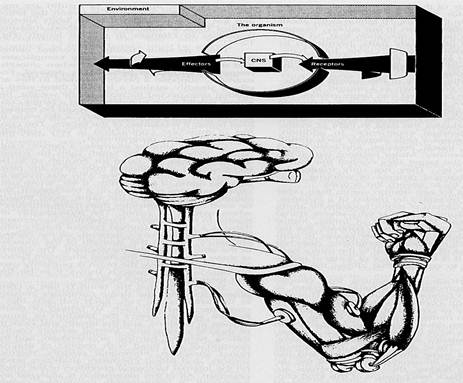
Neuromuscular Integration in the Human Body
Peter and Justin concluded that they would have to build their own computer to control the spooler value as well as the pressure and force transducers. They worked on the project for a year with many problems along the way. Every transducer, microchip, resistor, amplifier, filter, rectifier, voltage regulator, diode, semi-conductor, and other electronic parts had to be individually integrated and hand soldered by them onto boards. The result was what we called the “Blue Box” and was our own microcomputer. Our microcomputer predated Apple but, at that time, we were focused on building a computer “brain” to control our exercise machine. If we had pursued it as a computer for the home and small office, who knows what would have happened to us and our company!

We had to build our circuitry by hand. There were no electronics available to achieve the functions necessary
The exercise machine’s “brain” would need to continuously “know” the magnitude of the hydraulic pressure inside the cylinder. With this information, the computer would have to rapidly adjust the pressure by regulating the valve. In addition, rapid and precise bar position would have be received and processed.


Our first model micro-computer or the first personal computer in the World
With data from the various transducers, everything needed to operate the exercise machine was available for the program to process. There were several limitations that we would have to overcome to make the equipment practical and producible. One thing we needed was a miniature device which could convert analog to digital data for the computer. The device the exercise machine needed had to be small and fast. Although huge main frame computers could perform this task, they were entirely too large and much too expensive for our needs.
The “Blue Box” integrated with the exercise machine

Our second model micro-computer to control the exercise machine but also to be used as simple personal computer with a printer. The floppy disks still from a beta site one of the first ever used in computers
The “Blue Box” could do everything necessary to operate the equipment. The user could exercise and actually read a small screen which provided instructions and feedback while the person followed a workout program. But the “Blue Box” was filled with components which required intensive time to wire and was, therefore, impractical for production numbers. In addition, we all recognized that the functionality of our creation was inelegant in appearance.
While Peter and Justin continued to develop and refine the “Blue Box”, I searched for a solution for the analog to digital conversion. I decided to attend an electronic conference in Chicago where I strolled up and down the many isles of displays and perused the numerous and varied devices presented. There seemed to be miles of rows packed with booths. At one of the booths, there was a display of computer games which were running on Atari computers. The original Atari company was founded in 1972 by Nolan Bushnell and Ted Dabney. It was a pioneer in arcade games, home video game consoles, and home computers. The company’s products, such as Pong, helped define the computer entertainment industry from the 1970s to the mid-1980s.
I watched with fascination as one of the fellows in the booth controlled a submarine on a screen where he fired computerized torpedoes at some unseen enemy. The fellow was manipulating a joystick to control the movements of the submarine and to aim the firing mechanism at the target. I realized immediately that he was controlling the digital signal on the screen with the analog interface of the joystick. I introduced myself and the fellow told me that his name was Dennis Kitz.
Mr. Kitz was using the Atari computer to operate the games which he had stored on computer cassettes. I described to Mr. Kitz what I needed and inquired whether he thought that his analog to digital device could be adapted for use on our exercise device. He was relatively confident that he could make the necessary modifications but that he would come to our Amherst office to see everything first hand.
One sunny day, Mr. Dennis Kitz rode his big, black Harley Davidson motorcycle up to our office and parked in front to the amazement of a group of passing elementary school children. There were quite a number of “ooos” and “ahhs” as the children walked by on their way to school. Perhaps, they were also amazed by Mr. Kitz large presence as well. Dennis was approximately six feet three inches, hefty build, with a big black beard. I suspect that the school children thought that Paul Bunyan, the mythical lumberjack had appeared in real life. Actually, Dennis was large in statue but had a quiet demeanor.
We showed Dennis what we had developed to this point. We demonstrated the “Blue Box” computer, the valves we were trying to control, and described the ultimate goal. He said he would try to design and build an analog to digital device that we could use and then roared off on his motorcycle.
Dennis returned to our office a few weeks later with a mechanism which Justin and Peter were able to interface with our “Blue Box” microcomputer. The device was able to read the signals from the hydraulic force and position transducers. Then, these analog signals were converted into digital form enabling the computer to process the data. From this point forward, the “Blue Box” could drive the system using digital signaling.
The small analog to digital device that Dennis Kitz built for us was a significant advance in the miniaturization process that we would have to aim for in the future if we were to develop a viable, marketable product. We were able to take the designed board to a manufacturer who could mass produce it. Now the next step was to find a suitable computer. It would have to be small and fast but we had some options which were now being actively marketed.
We had several candidates to consider for computers to replace the “Blue Box”. At the time, CBA had in-house computer capabilities, to replace our dependence on the University’s main frames, with a Data General NOVA computer. Data General had introduced the “NOVA” line in 1969. It was packaged into a single rack mount case and had enough power to do most simple computing tasks. Our business was one of the many science laboratories around the world which purchased the more than 50,000 units sold. We were able to perform all of our CBA biomechanical work on the NOVA and it appeared to be an excellent interim step to use for the exercise machine’s “brain”. Ideally, we would need something smaller in the future, but it was more versatile than the “Blue Box” for the time being. We continued to search for the “perfect” small computer.

Running the Exercise Machine with the Data General Micronova
Fortunately, I had developed a strong working relationship with the people at Data General as previously described in the Chapter about the USOC. When Data General introduced the microNOVA series, it seemed perfect for our needs. We could use this smaller computer for our in-house computing needs. In addition, because it was small and fast, we began to adapt our exercise machine software to run on this computer.
About the same time that we were searching for all of these different components, we needed to find someone to manufacture the hydraulic assembly for regulating the flow of the oil. We wanted to have a more reliable valve and manufacturer. We located a potential manufacturer in Framingham, MA who indicated during a phone conversation that he believed that they could provide the hardware we needed. We drove from Amherst through the beautiful Fall colors to a small facility in Eastern Massachusetts.
The company, Framingham Metal Works, was owned by two brothers, Joe and Frank Capelli. They patiently watched our demonstration of the hydraulic pack that we were currently using which employed a screw valve. We explained that the exercise machine worked on a closed-loop feedback system. What this entailed was a continuous interaction between the pressure transducer, the position sensor, and the computer which controlled the hydraulics. When the person exercised, there was pressure on the piston in the hydraulic cylinder which was detected by the transducer and transmitted to the computer. As the pressure changed throughout the exercise, the computer had to continuously open and close the valve to regulate the pressure. The second component was the position of the bar which was communicated to the computer with a signal from a linear transducer. The analog input from the pressure and linear transducers was converted into digital signals with the board we had acquired from Dennis Kitz. The computer processed the information and sent the signal to the stepper motor to open or close the valve.
We explained that the entire system worked perfectly except that the screw valve was too slow plus it was non-liner making it more difficult to control. We needed a faster valve and the University professor has sent us to them for a faster valve. He believed that a spool valve would function more quickly and provide more finely regulated oil flow.
Joe and Frank discussed a number of ideas with us and outlined their proposed design for the spool valve within the hydraulic pack. We agreed to return in a week to try their design. We drove back a week later and they had an entire hydraulic pack built using a spool valve. It worked perfectly. In addition, they agreed to make a better “frame” for the hydraulic pack and the bar so that we could more easily demonstrate the exercise machine to Wilson Sporting Goods who were coming to see our fitness device.
Through the 1970s, the sporting goods industry was dominated by hunting and fishing equipment, and hardware stores competed with sporting goods outlets for business. By the late 1970s and early 1980s, however, several factors began to transform the industry. The nation as a whole grew increasingly health-and fitness conscious, sparking a boom in sales of exercise gear as well as apparel. In addition, the booming participation of women in sports of all kinds opened up whole new markets that only barely existed before. The expanding variety and specialization in equipment for all sports necessitated space for the vast selections now pushed by manufacturers. While adults between the ages of 25 and 44 constituted the mainstay of purchasers, industry leaders recognized a need to focus their marketing strategies on the inclusion of both younger as well as older consumer groups. Combined, these factors vastly transformed the industry’s base, toward large retail outlets featuring several departments catering to different sports and activities.
As the fitness industry sparked consumer appeal for exercise equipment, accessories, and athletic wear, trends gradually shifted from sporting goods stores, which were typically sole proprietorships and small “pro shops,” to franchises and eventually sporting goods chains. Bicycle shops even began changing their names to “bicycling and fitness” shops and expanded their product mixes to include exercise bicycles, treadmills, climbers, and weight machines to capitalize on the craze. These types of stores appealed to a growing number of consumers who were exercising in their own homes.
We were positive that our exercise machine, with its abilities was appropriate to all ages and genders, would be a perfect product for Wilson Sporting Goods. We were extremely excited about the potential meeting with them in our Amherst office to show them our computerized exercise machine since in the 1970s, Wilson Sporting Goods was one of the foremost leaders in the sporting goods industry. Although, the Wilson Sporting Goods company had its roots in the New York City meat packing plants in 1913, it had evolved over the years. As early as 1915, the company produced athletic uniforms, golf caddie bags, footballs, and basketball. In 1931, they introduced the Wilson Duke football, featuring lock-stitch seams, hand-sewn ends, and triple lining which was adopted as the official ball of the National Football League. After World War II, they focused on tennis and signed Jack Kramer to help them design rackets. By 1970, after they were acquired by PepsiCo, they sold the official balls of the National Basketball Association and National Football League as well as providing most of the team uniforms for Major League Baseball and the US Summer Olympics teams. Naturally, we recognized that this could be a fantastic company to manufacture and market our product.
The days leading up to our first meeting with Mr. Bill Cooksey of Wilson Sporting Goods were some of our most nerve-racking times. He had the Lewis and Clark job of discovery and exploration, that is to say, Mr. Cooksey’s job was to search for new and exciting products that Wilson Sporting Goods could acquire and market. That our exercise machine was the most advanced and exciting product available anywhere on Earth did not mean that everyone would recognize it in that elevated position. We practiced our presentation many times and kept our fingers crossed that we could convey the power and versatility that the system encompassed. We knew the machine was fabulous but would we be able to get this point across.
The meeting with Wilson Sporting Goods was set for the late morning but each staff member was ready much earlier. Promptly on time, Mr. Cooksey walked through our office front door and our nervous wait came to an end. Our presentations were flawless and the exercise machine proved to be a winner. Although, we still used the “Blue Box” for the presentation, we explained about the Data General microNOVA that we were planning to utilized. In addition, we describe the hardware improvements that were currently underway with the Capalli brothers and that we were planning a more attractive frame to house the machine in the future.
After a lunch meeting, we returned to the CBA office and discussed other items on Mr. Cooksey’s list of questions. He seemed pleased and excited about everything we had shown him and, as he left, assured us that we would hear from Wilson very soon. Needless to say, we enjoyed a delicious celebratory meal at one of the local restaurants that evening.
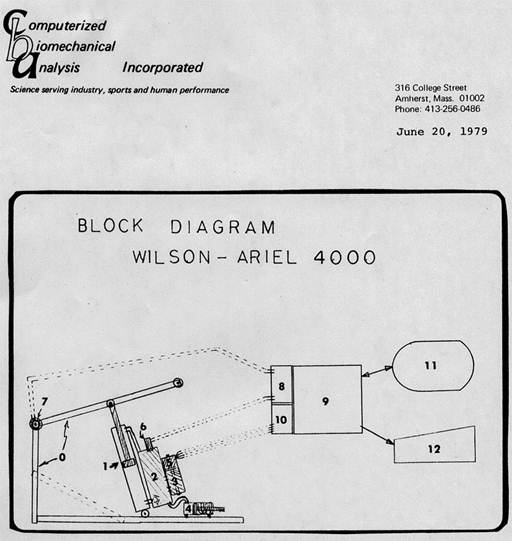
The original concept for the Wilson-Ariel Machine
Now that we had a manufacturer for the hydraulic pack unit, we continued our search for a manufacture for the frame. Joe and Frank Capelli explained that, while they could make the frame and the pack, we might be more efficiently served by going directly to a Connecticut company who already manufactured the spool valve they were using. Perhaps this company could make everything at one site. This was a gracious suggestion since they were relinguishing their opportunity to make money manufacturing our system. However, they felt that this alternative option was better for us.
We visited the Connecticut company which the Capelli brothers had recommended. They were able to manufacture the frame and the entire hydraulic assembly for a reasonable price. We were pleased with the arrangement and immediately worked on integrating our computerized electronics with the frame-hydraulic pack. As soon as had our first system tested and ready we were able to demonstrate it. By this point, our negotiations with Wilson Sporting Goods were nearly completed.
We were extremely lucky that during our time of innovation and invention on the CES, the computer industry was sharing a revolution as well. Although we were satisfied with the performance and reliability of the Data General microNOVA, the size and price tag were significant problems for use with our CES. We continued to search for a suitable alternative.
Simultaneously with our search for a smaller, less expensive computer, we continued to work on programming the microNOVA because that was the system that Wilson Sporting Goods preferred. We had discussed the computer situation with Mr. Cooksey during his visit. However, Wilson Sporting Goods was more comfortable using a known, well-established company rather than trying to adapt a “hobby” type computer. Therefore, we continued to develop the software for the CES on the micro NOVA.
The Wilson-Ariel 4000 first brochure
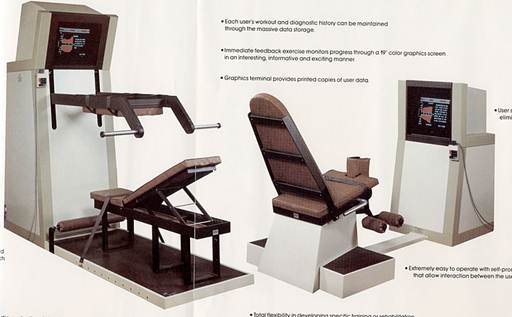
The Wilson-Ariel Exercise Machines
We were able to reach a fantastic agreement with Wilson Sporting Goods in 1979. The basic plan was that they would manufacture and sell the CES and CBA would receive royalties on the sales in addition to continuing consulting fees to help develop and advance the CES. They were also prepared to obtain patents on the CES and its various components which would protect all of our investments of time, money, and intellectual concepts. Wilson planned to take the manufacturing task to their Chicago facility so they were able to satisfy the initial purchases from the Connecticut company and then conclude that relationship.
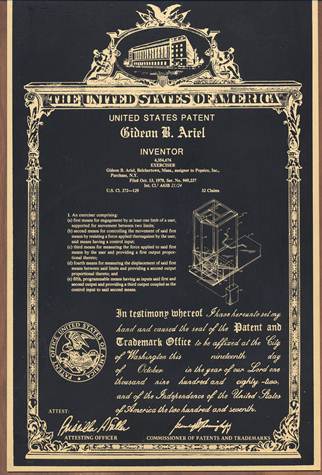
One of the 19 Patents issued for the Ariel Computerized Exercise Machine
The arrangement with Wilson Sporting Goods seemed to be a dream and we were sometimes surprised to pinch ourselves awake and discover that it was reality. Their plan included manufacturing the CES in their Chicago facility. We were so excited by their commitment to CBA and the development of the CES. Wilson was as enthusiastic as we were and had chosen to name the CES as the “Wilson Ariel 4000”. They intended to subcontract some of the components, such as the hydraulic pack assembly and the frame portions. They would purchase those components in sufficient quantities, as well as the microNOVA, to allow large discounts from the different subcontractors. Then the final CES product could be sold for a reasonable and competitive price. The Wilson plan was multi-level since they were planning to initially target the higher priced medical market, including physical therapy. The next tier would be corporate fitness programs and larger university athletic programs. Eventually, they expected larger, less expensive retail market for sports enthusiasts. (See Appendix 3 for the Wilson Brochure about the CES)




The Wilson-Ariel Computerized Machines running on Micronova Mini Computer
I had many ideas for adapting and designing the CES for specific purposes. For example, Ann and I were developing a prototype, drawer-sized CES for NASA to use on the Space shuttle. This CES exercise device was developed to address two separate, but possibly related, subjects. The first obvious consideration was to assist the astronauts to maintain their muscular strength while in the microgravity space missions. One serious problem that their astronauts encountered was the inability to walk and move about when they returned to Earth. Time was required for them to recover their muscular strength.
A second and more serious problem was that the NASA astronauts suffered from osteoporosis during even short duration space missions. The most common disease affecting bones, osteoporosis, literally meaning porous bones, results in the loss of bone mass, rendering bones brittle and more susceptible to fractures. Here on Earth, this condition afflicts both men and women, although it tends to be a problem that plagues more women than men. In addition, Earth-bound osteoporosis affects women more severely than men, especially after menopause.
Exposure to the microgravity environment of space causes astronauts to lose calcium from their bones. This loss occurs because the absence of Earth’s gravity disrupts the process of bone maintenance in its major function of supporting body weight. Exercise creates forces that stimulate bone development. Bones are composite structures, made up of bone matrix and mineral deposits that fill out the matrix.
It had been reported that astronauts in space could lose as much as two percent of bone mass per month, which is several times more than is lost by patients with osteoporosis. Bone cell formation depends largely on the effects of weight, both through gravity and exercise. When weight is suppressed, bones undergo a process of demineralization accompanied by a loss of calcium to the blood.
Normally, the breakdown of old bone mass (resorption) and the formation of new bone mass (growth) occur constantly, in a balanced cycle called remodeling. Bone cells called osteoblasts make new bone, and cells called osteoclasts break down old bone mass. In the weight-bearing parts of the skeleton, exposure to microgravity depresses the activity of bone-forming cells (osteoblasts) and may or may not stimulate bone-resorbing cells (osteoclasts). The remodeling process becomes unbalanced and the result is a localized loss of bone mass. Research also has shown that calcium is distributed differently throughout the skeleton in microgravity and in Earth-based space flight models such as bed rest.
Discoveries made in the course of space biomedical research on bone are already contributing to a better understanding of osteoporosis and the treatment of bone mass loss on Earth as well as in space. The single most important contribution that NASA research has made to the understanding of bone deterioration in osteoporosis is the heightened awareness of the importance of gravity, activity, and biomechanics. In other words, there is a significant mechanical basis in the biological activity in bone remodeling.
Mechanical forces, that is, the action of energy on matter, appear to coordinate bone shaping processes. The standard theory of bone remodeling is that the body translates mechanical force into biochemical signals that drive the basic processes of bone formation. Aging, especially in post-menopausal women, and exposure to microgravity uncouple bone destruction and formation. When this uncoupling occurs, formation lags behind bone restoration and the result is bone loss.
Researchers are not yet certain whether bone resorption speeds up or the bone formation slows down, though recent experimentation in space indicates that microgravity might somehow affect both processes. Progress in developing methods of preventing or treating disuse atrophy and osteoporosis depends on better understanding the mechanisms that cause the problem. Determining how the body translates mechanical loading (physical stress or force) into the signals that control bone structure may reveal how aging, inactivity, and space flight uncouple bone formation and resorption. Only in the absence of gravity can we determine the influence of weight and stress on bone dynamics.
By studying what mechanisms translates mechanical stress on bones into biochemical signals that stimulate bone formation and resorption, space life scientists may be able to determine how to maintain bone mass. Researchers do not yet know exactly what type and amount of exercise, hormones, or drugs might prevent bone loss or promote bone formation. However, some combination of sex hormones and/or growth hormones and exercise seems to be the key to preventing bone mass loss associated with chronological aging and post-menopausal hormone changes on Earth.
We believed that the CES could be programmed to address this specific issue. By utilizing the “force” option, we believed that the system would promote greater stress at the bone-muscle connections. We envisioned that the feet could be held in “shoes” attached to the floor of the shuttle module. Then various exercises, for example a squat exercise, would require muscular forces thus produced stress on the bones as well as strengthening the muscles. By generating stress on the bones, perhaps the body would have to replace rather than remove calcium from the bones. The goal would be to stimulate the development and replacement of the bones through exercise. We believed that this would a better stimulus for healthy muscle-bone growth and development rather than having to rely on drugs.
Our hope was that the modified CES would assist in the prevention of Space-induced osteoporosis. Furthermore, the proposed CES for the NASA shuttle missions could subsequently be adapted for hospital and home use.

Ann and I working in NASA to integrate the CES with the Astronauts training

First Prototype of the NASA machine
Our proposal for NASA on the development of the special CES for NASA is covered in Appendix 4.
This proposal resulted in NASA work with ADI to develop the NASA machine as shown below.



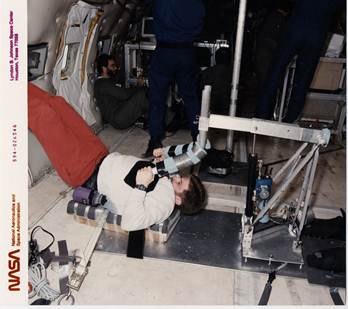


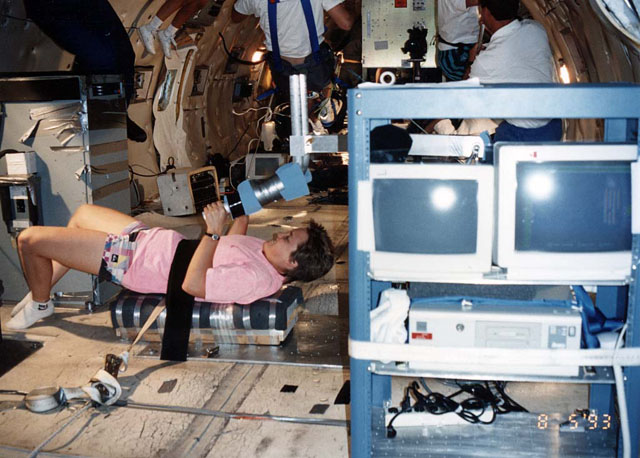
The Computerized Exercise Machine modified for NASA shown on the KC-135 plane

Typical output to be stored and transmitted
The success of the program with NASA on the CES is expressed by the head of Biomechanics for NASA, Dr. Mike Greenisen.


Mike Greenisen Mike and me on the KC-135 with the CES
MAR 17 1994
attention d: SD5-94-513 1 3
Gideon Ariel, Ph.D.
Scientist
Universities Space Research Association
Ariel Dynamics
6 Alicante
Trabuco Canyon, CA 92679
Dear Dr. Ariel:
Thank you for delivering the second generation Resistive Exercise Dynamometer RED. This is a remarkable design with the potential for an enormous positive impact on How astronauts exercise in space. The potential for modifying the RED such that it becomes a stair stepper or a rower is especially ingenious. Please extend my congratulations to Mr. Phill Harmon and his staff for a truly superb effort !
In addition, the potential use of the RED as a dynamometer to measure skeletal muscle performance during space flight missions will be a major technological breakthrough. This option will provide NASA the capability to monitor skeletal muscle strength changes while on orbit. Knowledge of these changes will be a major enhancement that will enable appropriate space flight exercise countermeasures to maintain muscle performance.
Sincerely,
Michael C. Greenisen, Ph.D.
Manager, Exercise Countermeasures Project
Michael C. Greenisen is the manager of NASA’s Exercise Countermeasures Project, where he is responsible for the physiological functions of the astronaut crews for both space shuttle missions and the International Space Station. NASA also recently selected Michael as “The Increment Scientist” on a pending Space Station Expedition Flight. His experiences also include work with the Russian Space Program, and studies to determine effects of space flight on the skeletal muscle fibers. He is now involved with the planning for the pending Mars missions. In 1996, NASA awarded Michael its Award of Merit for his work “Formulating space medicine for human exploration of space.” In addition to his work with NASA, Michael is an adjunct professor at the University of Florida, visiting professor at Caledonian University in Scotland, and an associate member of the Mechanical Engineering Department at McGill University in Quebec. Michael is a National Research Council Advisor and a retired Lieutenant Colonel from the Army Reserve.
Although our initial contact with Wilson Sporting Goods had been Mr. Cooksey, we were disappointed when he told us that he was being reassigned to a new project. His primary job was to find new and exciting products and we had been one of these stimulating projects. Our new contact was Mr. Bill Morrisroe, one of the Senior Vice Presidents, and Mr. Richard Smith, the corporate council from PepsiCo to Wilson. They were instrumental in concluding the relationship with the manufacturing in Connecticut, cementing the arrangement with Data General, and providing the law firm for the CES patents.
Mr. Morrisroe assigned Mr. Lou Tabickman as the general manager for an entirely new division within Wilson, Fitness Systems. They hired about 20 people to continue the CES development in conjunction with CBA’s continuing cooperation and contributions. The development stages included immediate improvements in the software, work with their designated electronics manufacturer to develop “plug-in” hardware boards, and improved stepper motor drive boards, as well as more attractive external framing for the CES. This would enhance the external appearance of the machine as well as significantly improving the internal hardware and computer software.
Wilson had made it clear that they were planning to develop, manufacture, and market the most sophisticated exercise machine that had ever been created. Their plan was to create a first class system and avoid any suggestion that this was merely a “hobby” device. In addition to the generous licensing agreement, Wilson also included a consulting agreement to maintain the development ideas and to smooth any production difficulties. We were more financially secure than we had been when we merely conducted single company service contracts. This was clearly a fantastic path for our immediate future. Although the financial benefits were greater than we had expected, we were all devoted to the CES project. The CES was our “child” and we were totally enmeshed in the care and rearing of our offspring.
The early time of our relationship with Wilson Sporting Goods to develop and refine the design as well as patenting as many components as possible was quite stimulating and enjoyable. Everyone at CBA was enthusiastic about the project and eagerly participated in each task that Wilson assigned. The patent work was quite specific and demanding but we were able to provide dated documentations and purchase invoices to substantiate all of our claims. It was tedious work but fulfilling. The technical details involved with the hydraulic pack required many hours and great effort in order to perfect the final version.
During the time between 1978 and 1981, we were also involved with opening a laboratory in Coto de Caza, California. This required quite a number of transcontinental trips with many of them routed through Chicago. Once we had the facility in California available, it would provide an additional location for demonstrating the CES.

Our research center in Coto De Caza California
The fellow that Wilson had placed as the manager of the fitness systems division seemed to be exerting great effort to impress both his superior managers and me. He was responsible for hiring the twenty people in Chicago which included engineers, office staff, and even sales personnel. Since I had never worked in a large corporate entity, it seemed a strange organization to me. I assumed that the development steps would be in logical order. First, the product would be perfected, then manufacturing procedures would be implemented, and, lastly, marketing and sales activities would commence. Under Lou Tabickman’s guidance, all of these steps were activated simultaneously.
About once a month, Lou and I met. He had some habits that really irritated me but I tried not to encourage his annoying behavior by ignoring many of the things he did. I never knew if he did things to annoy me on purpose or whether this was just his character. Unfortunately, it did not make any difference since we had several clashes.
Despite my discomfort with Lou, the CES project continued to develop with excellent results. The law firm which Wilson had hired solved all of the necessary contractual obligations for hardware, such as computers, stepper motor boards, and other electronic components in addition to obtaining several patents (see Appendix 5) on the CES. The frame and hydraulic pack assembly were improved in external appearance and some beautifully designed logos were developed.
We demonstrated the equipment at several national shows and Wilson’s marketing genius produced fantastic results. They were able to have the CES presented on television and in the print media as news rather than as advertising. The uniqueness of an exercise machine with a “brain” was exciting and truly news worth to local stations. I was so proud of this accomplishment and more than happy to describe it to anyone who would listen. I do not mean that I was bragging or egotistical in my outlook; I truly believed, then and now, that the CES was unique and effective for fitness and training.
The most destructive encounter with Lou occurred at a fitness trade show in Las Vegas, Nevada. I was enthusiastic in my demonstrations of the machine and was in the Wilson booth from the beginning to the close of the exhibits every day. Suddenly, one of my first, pre-Wilson customers approached me with an angry expression on his face.
“Why didn’t you tell us that you have a small home unit?” he demanded.
“What are you talking about?” was my flabbergasted response.
“Upstairs on the 14th floor, Mr. Tabickman and the other Wilson representative have a cocktail party and are demonstrating a new, small home CES unit” he answered.
I was speechless and the look on my face must have convinced him that I was unaware of the CES unit or the party that he had just described. “Show me” I told him.
We rode up in the elevator and I followed him to the room. After he knocked and the door was opened, I walked right it as though I have been invited. It was exactly the way it had been described, with tables of food and a small, Wilson-labeled home CES unit in the center of the floor.
I walked quickly over to Lou, who was standing next to the unit and demanded to know what was going on and why I had not been informed. Lou’s response was that I did not have to know everything since he was in charge.
My response was “Yes, I do have to know everything since this CES is my invention.” I pivoted and walked out of the room.
I returned to the Wilson booth in the main exhibit hall and began to pack my briefcase. Just then, Ann arrived from the airport having flown in from Massachusetts. I told her that we were leaving and, despite the shocked look on her face, she turned with me and we left.
We took the next flight back to Amherst. The first thing in the morning, I gathered the Amherst office staff. After describing the preceding few days and the encounter with Mr. Tabickman, I announced that we were on our own now. We were going to develop the “Ariel Computerized Exercise Machine” and it was going to be completely controlled by a microcomputer, such as the Radio Shack, and we were no longer going to utilize the Data General computer. Furthermore, I set a dead line of one month from that moment when we would demonstrate this finished product to the President of Wilson Sporting Goods in our office.
My insistence that we employ a “microcomputer” stemmed from the belief that smaller, faster, and more flexible computers would constitute the future. The large main frames and even the mini computers currently available were going to be utilized by large corporations who needed to process huge quantities of data. Our need was for smaller, faster, and more nimble computer capabilities. We had previously developed the “Blue Box” but it was too labor-intensive for us to mass produce. I insisted that the CES would have to operate on the best available “microcomputer”.
A “microcomputer” is a computer with a microprocessor as its central processing unit (CPU). It includes a microprocessor, memory, and input/output (I/O) facilities. Such computers are physically small compared to mainframes and minicomputers, such as the microNOVA. Many microcomputers (when equipped with a keyboard and screen for input and output) are also personal computers (in the generic sense). The Commodore 64 was one of the most popular microcomputers of its era and was the best-selling model of home computer of all time.

Available Micro-computers in the early 80’s
The abbreviation “micro” was common during the 1970s and 1980s, but has now fallen out of common usage. It is most commonly associated with the first wave of all-in-one 8-bit home computers and small business microcomputers (such as the Apple II, Commodore 64, BBC Micro, and TRS 80). The period from about 1971 to 1976 is sometimes called the first generation of microcomputers. These machines were for primarily for engineering development and hobbyist personal use. The MITS Altair played an instrumental role in sparking significant hobbyist interest, which itself eventually led to the founding and success of many well-known personal computer hardware and software companies, such as Microsoft and Apple Computer. Although the Altair itself was only a mild commercial success, it helped spark a huge industry.
By 1977, the introduction of the second generation, known as home computers, made microcomputers considerably easier to use than their predecessors. Previously, these earlier versions often demanded thorough familiarity with practical electronics in order to make them operational. The ability to connect to a monitor (screen) or TV set allowed visual manipulation of text and numbers. The BASIC language, which was easier to learn and use than raw machine language, became a standard feature. These features were already common in minicomputers, with which many hobbyists were familiar. In 1979, the launch of the VisiCalc spreadsheet (initially for the Apple II) first turned the microcomputer from a hobby for computer enthusiasts into a business tool.
The TRS-80 was Tandy Corporation’s desktop microcomputer model line, sold through Tandy’s Radio Shack stores in the late 1970s and early 1980s, and was one of the earliest mass-produced personal computers. The first units, ordered unseen, were delivered in November 1977. Among the notable features of the original TRS-80 included its full-stroke QWERTY keyboard, small size, its floating point BASIC programming language, an included monitor, and a starting price of $600. By 1979, the TRS-80 had the largest available selection of software in the microcomputer market. This included FORTH which was the language we had selected to control the stepper motor for our CES equipment.
The Original TRS-80 Micro-Computer
Radio Shack marketed the TRS-80, affectionately nicknamed CoCo, as a home computer in 1980. It was one of the earliest of the first generation of computers marketed for home use in English-speaking markets. The original version of the Color Computer shipped in a large silver-gray case with a calculator-like “chiclet keyboard” and was available with several memory sizes. We opted to use the 16K memory size. Versions with at least 16K of memory installed shipped with standard Microsoft Color Basic or (optionally) Extended Color Basic. It used a regular TV for display and TV-out was the only available connection to a display device.
For years, we had been working on both software and hardware developments for the CES as parallel efforts. For example, with each change in the valve configuration, we usually needed to adapt the software to control it. We were searching for a microcomputer with enough processing speed, controllability features, and for the right price. We tried a number of different companies and, eventually, focused our efforts on the Radio Shack TRS-80 which used the Motorola 6809 chip.

The Motorola 6809 chi; and its circuitry
The Motorola 6809 chip was introduced in 1978 and was a major advance over its predecessors. Among the significant enhancements were the use of two 8-bit accumulators into a single 16-bit register, two16-bit index registers, and two 16-bit stack pointers. In addition to these technical enhancements, for our specific purposes, the 6809 was a faster and more easily controlled chip to handle our increasing more sophisticated programs.
After Radio Shack introduced a floppy drive in 1978, we were able to develop our own console. Our CES console had the Radio Shack TRS-80 nested within the frame exposing only the keyboard and beside it were two double-density floppy disk drives.


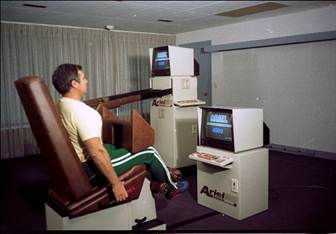
The first Computerized Exercise Machine running on the Radio Shake TRS-80
First used to store data in 1962, magnetic disks initially provided supplemental memory in high-speed computer systems. They were considered ideal for this type of retrieval because a user could access information nonsequentially. The principle of magnetic recording is fairly simple. The magnetic recording (writing) and playback (reading) are carried out by a computer’s disk drive, whose function corresponds broadly to that of an audio record player. Data transferred from the computer to the floppy disk is relayed in the form of a binary code and received in the form of magnetic pulses, while the disk in turn conveys magnetic patterns that the computer receives as a binary code. This code uses only l’s and 0’s, which the disk represents as single magnetic pulses and the absences of pulses, respectively. Binary code is used because it most effectively utilizes the natural two-state characteristics of electricity and magnetism.
To record information on a disk, a magnetic head contacts the disk’s recording surface and magnetically imprints data onto it, translating the computer’s binary codes into the disk’s magnetic pulses. Once a magnetic pattern, consisting of many pulses and absences has been recorded, the disk retains the encoded information just like a permanent magnet. Retrieving information from the disk involves the opposite process. The magnetic head senses the magnetic pattern on the disk’s recorded surface and converts it back into an electronic binary code. The computer then “reads” this information, using it to perform calculations or translating it into letters and figures for display on the monitor.
Floppy disks, which were smaller and more flexible portable versions of the earlier magnetic disks, were introduced during the 1970s. Although they were unable to store as much data as larger more conventional disk drives and the data could not be retrieved as easily, floppy disks have become extremely popular in situations where flexibility, low cost, and easy use are important. The term “floppy disk” appeared in print as early as 1970. The first floppy drives used 8-inch floppy disks but were replaced by the 5 ¼ inch model. The size, according to one story, was that the size was the smallest diskette that would not fit in your pocket. The reason was that putting the diskette in a pocket was a near guarantee that it would bend. Another consideration was that a 5 ¼ inch drive would fit in the PCs of that day.
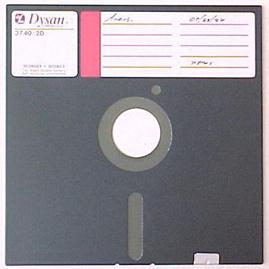
The 5.25” floppy disk
The floppy disk seems so simple and primitive today, but it changed everything since it was an enormous improvement on the unfriendliness and complications, in addition to cost, of the larger systems of the day. Until the late 1970s, most software applications for tasks such as word processing and accounting were written by the personal computer owners themselves. But with the floppy disk and transportable diskettes, companies could write programs, write them on the disks, and sell them through the mail or in stores. Now it became possible to have a software industry. At this point, everyone who owned a computer that used floppies could share programs and data with each other. Basically, the floppy disk converted microcomputers into personal computers. As time passed, smaller diskettes of 3.5 inch were introduced of sturdier construction and longer duration of use.
Regardless of size, a floppy disk was a storage medium and was composed of a disk of thin and flexible magnetic storage medium, sealed in a rectangular plastic carrier lined with fabric that removes dust particles. They were read and written on by a floppy disk drive (FDD).
In addition to utilizing floppy disks to operate the CES, we created a unique invention that was borne out of necessity. At that time, diskettes were read only from the disk drive head located above the diskette. The problem with this system was that the diskettes, which were made of thin plastic material, were easily worn through with a surprisingly short lifespan. We even had some program diskettes that were porous when held up to the light.
Dr. Wise invented a unique program which allowed the computer to read and write on both the top and the bottom of the diskette. This provided mirror backup for the program. His program instructed the computer to find the correct track on the opposite side if a track on one side was damaged or unreadable. This read-write option for the top and bottom of the diskette was so unique, that it was patented by IBM long after we had developed our program. Some of the patents describe this process as “Recursive” method for protecting data.
At that time, so many things in the developing computer world were needed but unavailable. This innovation associated with our CES system to read the diskette from the top and from the bottom but was essential to lengthen the lifetime of each diskette. But we created our own solution without realizing the patentable uniqueness of it. IBM patented it years latter.
Our plan for the CES was to use the drives to operate the entire CES system with floppy drives. We intended to turn the computer on, or “boot” as it was known at the time, operate the CES program, and save the generated exercise data. The entire system could be housed in a console we designed. Only the computer’s keyboard was exposed as were the openings for the floppy disk drives at the front of the console. The console design was similar to a simple desk. The remaining computer and floppy drive components were hidden within the console and, on the top of the console, was a color television which served as the display device. There was sufficient space on the top of this desk-like console to arrange backup diskettes, manuals, or other materials.
Alan and Jeremy were working long hours to finish the new computer programs to control the CES. I was putting pressure on them to have it completed before the visit to Amherst by the president of Wilson. Ann was working seemingly longer hours to maintain the other projects that CBA was working on for other companies. It was an extremely hectic time for all of us.
Approximately three weeks after my confrontation with Mr. Tabickman in Las Vegas was the meeting with Wilson. They walked through our office door in order of importance with Mr. Beebe, the president, followed by one of his vice presidents, Mr. Malcolm Caldlish, and lastly, Mr. Tabickman. Ann and I met them in our front office as cordial as possible.
Mr. Beebe had replaced Mr. Calley with whom we had enjoyed a fantastic relationship. Mr. Beebe was younger than Mr. Calley and projected a calm, thoughtful demeanor. Our previous interactions with him had been pleasant with no changes in our interactions. We were slightly apprehensive since we believed that the CES was a fantastic product with an extremely lucrative future but we had no idea what poison had been spread behind our backs.
We led all of them into our large development room which was adjacent to our motion analysis laboratory. We had set our CES unit in the middle of the floor covered by a blue drape. After we were all arranged, Ann pulled off the drape to reveal the new, smaller CES unit with its own console. The console, with the computer, disk drives, and television was less than half the size of the current Data General microNOVA that the CES was using in Chicago.

The new CES
I proudly turned on the power and started the computer. The picture on the display screen read “Ariel Computerized Exercise Machine” and a voice announced:
“I am the Ariel Computerized Exercise Machine. Although I use to cost $45,000 dollars now I only cost $5000. Let me show you how I work.”
I proceeded to demonstrate all of the functions that the CES could perform. We had duplicated all of the actions that the large microNOVA based CES could execute but was at a greatly reduced price. After the demonstration, we requested a private meeting with Mr. Beebe.
We adjourned to our conference room and Mr. Beebe asked what should be the next step. Our suggestion was to completely replace the current staff of the Fitness Systems department from the top to the bottom. In our opinion, they were limited in their exercise systems background, were woefully inadequate in their technical knowledge, and were stubborn and inflexible when ideas were suggested. The CES was a new, exciting, and had tremendous financial potential which would go unrealized with the current Fitness System members. Wilson Sporting Goods had a potential “gold mine” in its hands. The exercise, physical rehabilitation, and sport team fitness and training markets were huge and growing exponentially. Wilson could easily be the market leader before the other companies even began to think about the lucrative potentials available. We stressed our commitment and devotion to the product and to Wilson and hoped that he would find a workable solution.
Furthermore, we had experienced an excellent relationship with all of the Wilson staff prior to the establishment of this new department. Everyone had been helpful and contributed to all of the projects in addition to the CES venture. We had several on-going research projects with Wilson and everyone we worked with was creative and inventive in the approach to the studies. It was only with the people in the Fitness Systems department that were difficult and resisted any and all cooperative efforts. Our hope and suggestion was that the entire staff members of the Fitness Systems be replaced with new, innovative people.
Mr. Beebe thanked us for our candid appraisal of the situation and congratulated us on the newly developed CES. He even had some humorous comments about the announcement that the machine made when it was activated. Then he left the office with the two other Wilson personnel silently walking behind him.
Within two weeks, we were informed by Mr. Caldlish that the Fitness Systems Department had been abolished. He knew of no plans to replace them or even what the plans were at Wilson with regard to the CES.
Needless to say, we were elated that Mr. Tabickman and his underlings had been fired, but we were disappointed that there were no new plans for the CES mentioned in Wilson’s future. We decided that we would continue to work on the CES on our own and, at the same time, proceed with the on-going research projects with Wilson. We were analyzing their new golf balls and some unique options using different colors for softballs.
Despite our disappointment of not having Wilson Sporting Goods as our ally in developing and marketing the CES, we continued to work on perfecting its performance. One of our continuous challenges was to develop software so that the CES “learned” how to respond to each individual during an exercise. The response to the person had to feel smooth without any sensation of jerkiness. I had spent much of my time and effort in trying to create the smooth feel that people exercising would want to experience. I knew from my own personal experiences that the “feel” of the movements had to be smooth because athletic and normal motions are smooth not jerky. The bar movement had to be free of any jerky actions and I was determined to develop the CES accordingly.
At one time during the development, we had a problem with bar movement at the top and the bottom of the range. During the transition from up to down, the bar seemed to move without resistance so that it felt like a spongy gap of air. It was annoying to have this discontinuity in the smooth movement. We tried everything we could think of to correct the situation. Finally, Ann and I decided to return to the university and discuss the situation with the professor of hydraulic engineering who had been so helpful previously. We described the behavior of the system and he immediately identified the problem as “cavitation”.
“You know, like the submarines” he explained. Of course, we did not know about submarines but he explained what “cavitation” was. Cavitation is the formation and then immediate implosion of cavities in a liquid, for example, small liquid-free zones or “bubbles” that are the consequence of forces acting upon the liquid. It usually occurs when a liquid is subjected to rapid changes of pressure that cause the formation of cavities where the pressure is relatively low.
Inertial cavitation is the process where a void or bubble in a liquid rapidly collapses, producing a shock wave. Inertial cavitation occurs in nature in the strikes of mantis shrimps as well as in the vascular tissues of plants. In man-made objects, it can occur in control valves, pumps, and propellers.
Inertial cavitation was first studied by Lord Rayleigh in the late 19th century, when he considered the collapse of a spherical void within a liquid. When a volume of liquid is subjected to a sufficiently low pressure, it may rupture and form a cavity. This phenomenon is coined cavitation inception and may occur behind the blade of a rapidly rotating propeller or on any surface vibrating in the liquid with sufficient amplitude and acceleration. A fast-flowing river can cause cavitation on rock surfaces, particularly when there is a drop-off, such as on a waterfall.
Since we were creating a vacuum within the hydraulic system, he explained that we could solve the problem by following Bernoulli’s principles. As far back as 1738, a Swiss scientist, Daniel Bernoulli, explained the principle of fluid dynamics. His principle states that an ideal liquid is affected by pressure and speed of flow. An increase in the speed of the fluid occurs simultaneously with a decrease in pressure or a decrease in the fluid’s potential energy. The Bernoulli equation is a statement of the conservation of energy principle appropriate for flowing fluids. The qualitative behavior that is usually labeled with the term “Bernoulli effect” is the lowering of fluid pressure in regions where the flow velocity is increased. This lowering of pressure in a constriction of a flow path may seem counterintuitive, but seems less so when you consider pressure to be energy density. In the high velocity flow through the constriction, kinetic energy must increase at the expense of pressure energy.
Ann and I returned to the laboratory and discussed the problem with Alan and Jeremy. As the professor had explained, we had to precisely calculate the sizes of all of the hydraulic tubing and the sizes of the check and spooler valves. In a steady flow, the sum of all forms of mechanical energy in a fluid along a streamline is the same at all points on that streamline. This requires that the sum of kinetic energy and potential energy remain constant. Thus an increase in the speed of the fluid occurs proportionately with an increase in both its dynamic pressure and kinetic energy, and a decrease in its static pressure and potential energy. If the fluid is flowing out of a reservoir, the sum of all forms of energy is the same on all streamlines because in a reservoir the energy per unit volume (the sum of pressure and gravitational potential ρ g h) is the same everywhere.
Alan and Jeremy turned their attention to the calculations and within a week we were able to change the sizes of some of the hydraulic lines and the reservoir to adjust the hydraulic oil flow. After that, we had some minor corrections to perfect the “feel” but we had eliminated the unpleasant “spongy” sensation previously noted. One modification that we made was to change the shape and size of the spool valve into a triangular shape. This provide an increase in the control of the oil flow and, thus, improved the “feel” of the bar motion during exercise. (This attention to the Bernoulli principle has served us well for more than 30 years since no competitor has been able to reproduce the smoothness of our CES system.)
Another significant development in the control of the CES came from a combination of my personal experience in the “feel” or perceived sensations of exercise as well as my studies at the university in the Cybernetics department. The head of the department was Dr. Michael Arbib who was renown in the field. His work follows the title of his first book, Brains, Machines and Mathematics. Dr. Arbib believed that the brain is not a computer in the current technological sense, but that we can learn much about machines from studying brains and much about brains from studying machines. I first heard him explain this concept in one of the classes that he taught. He presented an attitude that an interdisciplinary environment in which computer scientists and engineers can talk to neuroscientists and cognitive scientists.
In his class, he introduced his primary research focus on the coordination of perception and action. This was approached at two levels: (1) via schema theory, which is applicable both in top-down analyses of brain function and human cognition as well as in studies of machine vision and robotics, and (2) through the detailed analysis of neural networks, working closely with the experimental findings of neuroscientists on humans and monkeys. I was excited and enthralled with the concepts of studying the brain, its feedback loops of control, the “intelligence” that machines can derive through, in my special application, computer control programming.
Cybernetics is a trans disciplinary approach for exploring regulatory systems, their structures, constraints, and possibilities. Cybernetics is relevant to the study of mechanical, physical, biological, cognitive, and social systems. It is only applicable when the system being analyzed is involved in a closed signal loop. In other words, when action by the system causes some change in its environment and that information is fed to the system via “feedback” that enables the system to change its behavior.
Contemporary cybernetics began as an interdisciplinary study connecting the fields of control systems, electrical network theory, mechanical engineering, logic modeling, evolutionary biology and neuroscience in the 1940s.
We were also utilizing what is known as “artificial intelligence”. Artificial intelligence (AI) was founded as a distinct discipline at a 1956 conference. After some uneasy coexistence, AI gained funding and prominence. Consequently, cybernetic sciences such the study of neural networks were downplayed and the discipline shifted into the world of social sciences and therapy.
Artificial intelligence (AI) is the intelligence of machines and the branch of computer science that aims to create it. AI textbooks define the field as “the study and design of intelligent agents” where an intelligent agent is a system that perceives its environment and takes actions that maximize its chances of success. John McCarthy, who coined the term in 1955, defines it as “the science and engineering of making intelligent machines.” My idea was that the computer software for the CES would be flexible it its ability to control the specific exercise, adapt to the person performing the exercise, and to provide sufficient feedback control to the hydraulic system for a smooth motion.
Thus, my ideas for the CES were with feet in both camps of thought and study: cybernetics and artificial intelligence. The CES needed feedback just as the brain does in coordinating all human functions and intelligence to perceive and act on actions. While I attended classes and studied all the disciplines described, I had to create the correct applications from each theory in order for the CES to operate perfectly.
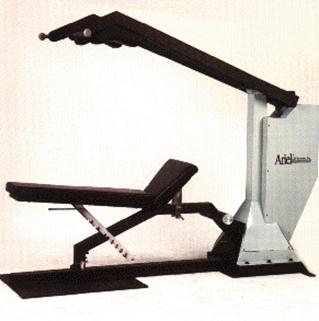
Our Multi-Function and Arm/Leg/Back Machines running on modern PC
We continued our development and manufacturing the CES. I met our first customer when I was demonstrating the Computerized Exercise System (CES) at the American College of Sports Medicine conference. This was a sports science and physical therapy show in Montreal in the Spring of 1980. A young, knowledgeable physical therapist from New Jersey spent about a half an hour asking questions and trying the equipment. Then he inquired about the price.
“The price is $10,000.00” I answered wondering whether this was an astronomically high figure. Most fitness equipment was far less expensive and most of the physical therapy machines were exceedingly pricey. I held my breath. The man reached into his pocket and pulled out a checkbook. He wrote ten thousand in the appropriate space, signed it and handed it to me as he left the booth.
“Where do I ship it? Don’t you want a receipt?” I called out to his receding back. The fellow turned and answered that the address was on the check and just kept walking away.

Bob Wainwright, our first ADI Customer
When I returned to Amherst at the conclusion of the conference, Ann was as surprised as I had been. “He didn’t even fill the line of who to pay” she noted. “Who is this guy?” she asked.
The man’s name was Robert Wainwright and his business was in northern New Jersey not too far from New York City. Mr. Wainwright received Serial Number 1 of the CES and, shortly after the delivery, Ann and I traveled to visit him.
He had a small physical therapy business and we spent the entire day working with him on the machine’s capabilities vis a vie his therapeutic needs. We demonstrated the ability to regulate the velocity of the bar, in both pulling and pushing directions. Most of the equipment at that time was either weight-bearing machines, which could not alter the velocity, or closed systems which allowed only fixed velocity bar movements. We demonstrated how our computerized system permitted the therapist to program the velocity to follow any pattern he or she desired. The same flexibility was permitted with force. In other words, the therapist could decide about the amount of force that the patient needed to push, or pull, and could program the system to adhere to that pattern. These options of controlling velocity or force were particularly useful with patients recovering from injuries.
Mr. Wainwright told us that he frequently had athletes with knee injuries. They could not maintain a constant force or velocity but needed the conditions to be more or less depending upon the exercise. They were often able to move the bar easily with a reasonable load at the beginning of the exercise but when the action began to generate pain due to the injury, the system needed to respond by reducing the load. Our equipment was the only system which could provide this control. It was the only one with the “brain” to program and adjust to the person exercising.
From his point of view as a physical therapist, Mr. Wainwright was extremely pleased with the options. We also demonstrated how he could strengthen a specific section of the movement by adding an isometric contraction in any location that he chose. This was very useful to him for strengthening certain muscles and a technique that was available only with our system.
We spent the entire day demonstrating the numerous exercise options available. He was also able to record and store each individual’s workout and print results for the prescribing doctor and insurance company. In fact, for many years, Mr. Wainwright was able to develop strong relationships with patients, hospitals, doctors, and insurance companies.
We also began to hold clinics at our facility in California since it was newer and larger than our Amherst office. We called these clinics “User Conferences” and they attracted people from around the World. We sold many CES to our Japanese distributor as well as many university research laboratories and physical therapy sites within the United States and beyond.

One of our 300 Systems in Japan running on the IBM PC
The CES had the ability to quantify movements greatly improving research studies. Previously, research studies were relatively imprecise in their measurement capabilities. The precision and quantification provided by the CES was also useful for physical therapy treatments and testing. At that time, many physical therapy locations were able to test patients referred by doctors and the tests were paid for by insurance companies. This treatment/testing structure had no effect on our revenues but merely demonstrates the efficacy of the device for treatment and quantitative measurements.
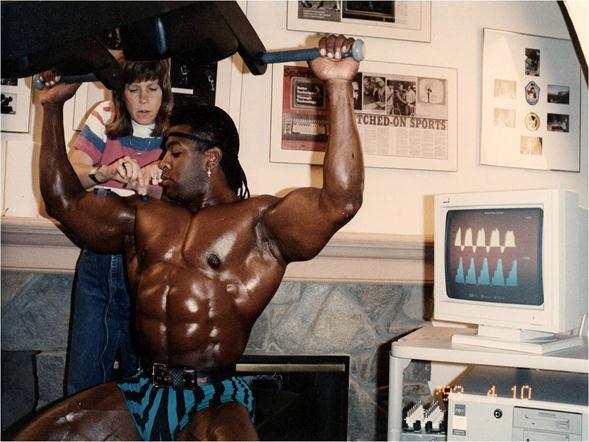
Ann Collecting Data on the CES Multi-Function Machine
As I look back over the past 30 years in the birth and life of the CES, I experience a multitude of thoughts and emotions. I had an idea for an exercise machine. A machine that could adjust to me if I wanted to adjust the velocity or force of my exercise, to add an isometric contraction at one or more points in the movement, and which could save my data for subsequent evaluation. The machine took on many additional features through the years, but during those first imaginations of the future device, it seemed like a simple concept to create. What a difference reality makes!
A great idea can remain just that – a great idea. But to actually make that idea into a functional system is not as easy as that first flirtation with a concept. In the case of the CES, there were no small computers, spool valves, stepper motors, analog to digital converters, or software to tell the computer when and what to do. None of the components we ultimately needed were available until we either created our own, such as the “Blue Box” computer with its own hardwired analog to digital converter, or discovered a part that someone or company had needed in an industry other than ours, such as the stepper motor. We were usually developing our own component before we were able to find someone else who had a need and they had created a solution for themselves. That was how we discovered Mr. Dennis Kitz and his game port board to control his on-screen submarine. The fortuitous discoveries helped to develop the CES into the fantastic machine that it became. But, first, there has to be the idea, the desire for the “widget” that is needed, and then successful integration of the parts. Not to mention the continuous development of the software to control the various interdependent components.
Fortunately, I had an idea and the tenacity to pursue it regardless of the many difficulties along the way. I was able to find the best talent for each need, from hydraulic engineers to software programmers. But perhaps my greatest strength, some might say my greatest weakness, is that I never, never, never quit until the problem is solved one hundred percent.
Upon reflection, I am reminded about Thomas Edison’s effort on what seems today to be a simple light bulb. From 1878 to 1880, Edison and his associates worked on at least three thousand different theories to develop an efficient incandescent lamp. Edison had to blow his own glass, find a filament that did not melt when electricity passed through it and that would maintain a soft orange glow, and would not blacken the inside of the glass bulb. I certainly am not trying to compare myself to Thomas Edison, but merely convey the difficulties that inventions pose. There is a tremendous amount of work between an idea and its production. I was lucky to be in the right place, with the best people, and at the beginning of the computer revolution. With all of these components in place, the CES idea became a reality.
After nearly 40 years, the CES is still unsurpassed in its abilities. No one and no company has ever successfully copied it. It is still the best device of its kind and I take great pride in realizing that it is my idea.
President Reagon and the German Chancellor Schroder on the CES Machine
Appendix 1 – The Universal Brochure where designed was applied

Appendix 2 – The Computerized Exercise Machine Concept presentation
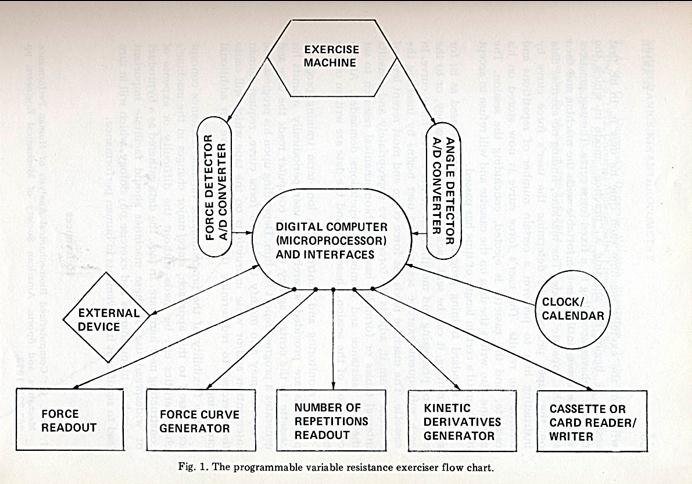
Appendix 3 – The Wilson Brochure
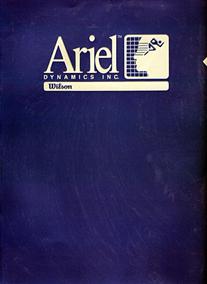




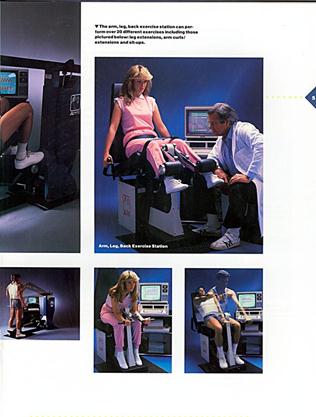



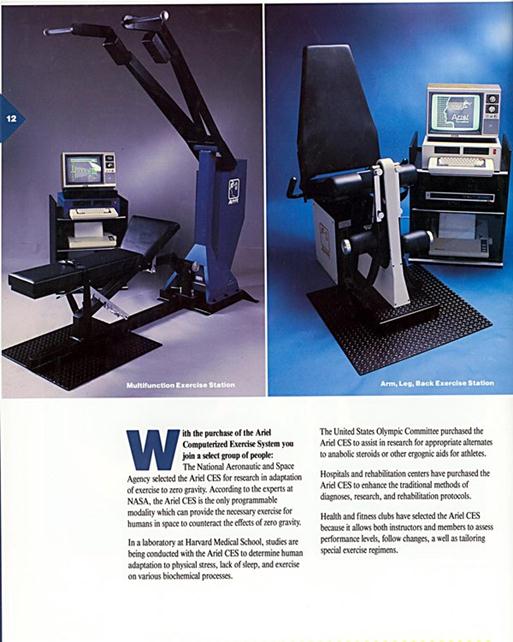
Appendix 4 The CES at NASA
The Computerized Resistive Exercise Dynamometer
by
Gideon B. Ariel, Ph.D. and M. Ann Penny, Ph.D.
March, 1991
1. IDENTIFICATION AND SIGNIFICANCE OF THE INNOVATION
The goal of this proposal is to develop a computerized, feedback-controlled,
portable, battery-powered, hydraulic dynamometer which can be used in normal,
reduced-g, and zero-g environments. The proposed device will provide a closed-
loop feedback system to measure and control various muscular strength
parameters. The innovativeness of this device includes (1) the ability to measure
muscular strength without the limitations imposed by traditional weight-related
devices; (2) computerization of both the feedback control feature, allowing
adjustment of the device to the individual rather than the individual
accommodating the device, and customization of the diagnostic and exercise
protocols with data storage capabilities; (3) low-voltage, (4) portability, and (5)
compactness. The relevance of the proposed equipment for NASA lies in its
ability to evaluate astronaut strength and endurance levels as well as to design
and follow appropriate exercise protocols in all gravitational environments. Data
can be stored for later evaluation and for use in conjunction with other medical or
physiological assessments in the continual effort to identify and counter the
deconditioning caused by microgravitational conditions.
Physical fitness and good health have become increasingly more important to the
American public, yet there exists no compact, affordable, accurate device either
for measurement or conditioning human strength or performance. This deficit
hinders America's ability to explore the frontiers of space as well. Without
appropriate means to measure physical force requirements under zero-g
conditions and without appropriate equipment for training for these task-related
activities as well as against the deleterious physiological effects of
microgravitational deconditioning, America's permanent manned presence in
space will be severely restricted.
One of the ways the human body reacts to the reduced physiological and
mechanical demands of microgravity is by deconditioning of the cardiovascular,
musculoskeletal, and neuromuscular systems. This deconditioning produces a
multitude of physical changes such as loss of muscle mass, decreases in body
density and body calcium, decreased muscle performance in strength and
endurance, orthostatic intolerance, and overall decreases in aerobic and
anaerobic fitness [1]. The biomedical reports from the Gemini, Apollo, and Skylab
missions and the work of Thornton and Rummell [2] have revealed a severe
problem of reduced muscle mass and strength loss of the lower extremities
following prolonged periods in microgravity. Since mission operations normally
require relatively greater load demands for the arms and upper body than for the
lower extremities, these findings were considered reasonable and not
unexpected. However, the use of a bicycle ergometer on Skylab 2 was unable to
provide sufficient aerobic exercise to maintain leg strength at earth-based, or 1-g,
levels since it could develop neither the type nor the level of forces necessary.
Devices which provided isokinetic resistance were employed on Skylabs 3 and 4
which resulted in higher leg force results than those generated in Skylab 2, but
were limited to an inadequate level [3].
A review of the effects of strength training on human skeletal muscle suggests
that the benefits of appropriate training would favorably counteract the negative
effects of weightlessness. In general, strength training that uses large muscle
groups in high-resistance, low-repetition efforts increases the maximum work
output of the muscle group stressed [4]. Since resistance training does not
change the capacity of the specific types of skeletal muscle fibers to develop
different tensions, strength is generally seen to increase with the cross-sectional
area of the fiber [5]. This may suggest an important finding in the effort to reduce
or prevent the loss of muscle strength associated with reduced-g exposures. It
may be that resistance training with the resultant hypertrophy would be an
effective countermeasure for strength loss.
Since the cause of space deconditioning is usually attributed to the absence of
gravity, the development of countermeasures is essential to interrupt these
adverse adaptational effects and to develop activities which will sustain normal,
robust fitness, conditioning, and good health. While experiments on the Gemini,
Apollo, and Skylab missions suggest that regular exercise was helpful in
minimizing several aspects of spaceflight deconditioning [6,7,8] there is a lack of
quantifiable measures of specificity and amount of physical exercise performed
by crew members during flight. Quantification of optimal intensity, frequency, and
duration of exercise during spaceflight is of utmost importance for manned
missions, yet "no data exists that provides even the slightest clue as to what the
forces and impact load of locomotion are in microgravity" [3].
Countermeasures are efforts to counteract the physiological problems caused by
exposure to zero-g by interrupting the body's adaptation process. Effective
countermeasures will promote mission safety, maximize mission successes, and
maintain optimum crew health [1]. Specific recommendations required by space
missions were identified by participants at "The Manned System - A Human
Factors Symposium and Workshop" sponsored by the American Astronautical
Society. The need for appropriate fitness and recreation facilities, methods, and
long-duration micro-gravity effects on EVA performance were identified as
important topics by such diverse areas as habitat engineers, operation managers,
EVA researchers, and the members of the Biomechanics group. The need for
appropriate performance protocols as well as the development of a flight
qualified dynamometer was emphasized.
The proposed equipment is intended for use as an effective countermeasure tool
as well as addressing several of the operational restrictions imposed by
spaceflight. Utilization of a hydraulic mechanism will provide a means for
adequately creating resistance thus overcoming the ineffectiveness of weight-
based equipment in zero-g. The apparatus will be compact, portable, and
powered by low-voltage DC batteries which eliminates the need for shuttle power.
These attributes are deemed necessary for easy and safe use in the restricted
confines of the shuttle or on the space station. Computerization will provide
several important innovations: (1) Activities performed will be programmable for
"individualized" diagnostic routines and/or exercise protocols with results stored
for subsequent evaluations. (2) The feedback control afforded by rapid
computerized assessment and adjustment will ensure that the equipment will
adjust to the performance levels of the astronaut rather than the reverse.
Individualized adjustment assures that size and/or gender are irrelevant for
successful operation. (3) Activities can be designed bi-directionally since
resistance will be provided in both directions of bar movement. (4) Graphic
displays and audio cues will provide information to the individual with such items
as current strength level, repetition number, and bar location. The sound cues
will be modulated in proportion to the exerted force in order to inform the
individual about his or her performance response without the need to see the
computer monitor. This will simplify operation as well as providing biofeedback.
One of the most important features of the proposed device will be its functionality
under all gravitational fields. Thus, medical and physiological researchers can
design and test models on earth with the ability to recreate and evaluate the same
models under reduced-g conditions.
The proposed device is specifically envisioned for application in musculoskeletal
activities such as strength and endurance. However, its use as a criterion
measure in quantification and/or verification of task performances in research
strategies concerning bone demineralization, leg compliance, muscle size, and
leg volume, may be appropriate. For example, the NASA Exercise
Countermeasure Project Task Force, chaired by William G. Squires, Ph.D.,
determined that the validity and effectiveness of exercise countermeasures will
be determined from the results of inflight studies and that the elucidation of the
basic mechanisms from space- and earth-based research would develop specific
acute and chronic exercise regimens to counteract physiological dysfunctions.
The proposed Computerized Portable Dynamometer would appear to be an
appropriate measurement device for such research.
2. PHASE I TECHNICAL OBJECTIVES
The goal of Phase I is to develop an operational computerized, feedback-
controlled, portable, battery-powered, hydraulic dynamometer for use in 1-g
conditions. The specific objectives required to accomplish this task are as
follows:
(1) Objective 1. To select a portable, battery-powered
computer which has the capability of interfacing with a
Controller board used for analog to digital signal
processing and dynamometer control. Additional
attention will focus on disk storage capacity, secondary
storage mediums, such as floppy drives, and visual
display characteristics.
(2) Objective 2. To develop software on the computer
identified in Objective 1 to operate the dynamometer.
(3) Objective 3. To test both the developed software and
the portable computer on an existing device that utilizes
a hydraulic valve, pack, and cylinder unit with an
attached bar. Force and position transducers will
provide the analog input signals.
(4) Objective 4. To test the calibration of the proposed
dynamometer device using known weights.
(5) Objective 5. To conduct a simple experimental test
using a squat exercise (a standing knee
extension/flexion motion) to demonstrate both the
feasibility and the functional capacities of the proposed
device.
The two major feasibility questions to be answered in Phase I are: (1) Is there a
portable, battery-powered computer commercially available with sufficient speed,
memory, and storage capabilities, and which has the capacity to interface with a
customized analog-to-digital (Controller) board, to support the proposed
dynamometer? (2) Can appropriate software be written for the proposed
dynamometer to control, assess, and store data required for evaluation and
testing the human muscular strength and endurance functions previously
discussed? The software considerations are not trivial. For example, several
problems to be overcome include (a) the power requirements of the computer, the
Controller board, and the transducers must be satisfied more efficiently than with
the greater capacities afforded with external power supplies of larger computers,
(b) rapid computer processing requires innovative programming code to afford
smooth response for real-time feedback control, and (3) the flat panel
monochrome display characteristics associated with portable, built-in single
monitor computers present a unique challenge concerning the speed and
esthetic qualities for the interactive visual medium.
During Phase I, the proposed dynamometer will be developed for earth-fixed
environments. All information generated and developed in Phase I will be utilized
in Phase II expansions. In Phase II, the proposed dynamometer will be developed
on a portable, battery-powered computer with the capability of connecting the
Controller board through an expansion bus. A specialized Controller board will be
designed to fit within the designated computer and will be enhanced to allow
additional analog input devices such as electromyography (EMG) and/or force
plate data. During Phase II, attention will be given to developing a variety of
options for force measurements by simple and creative orientations of the
hydraulic cylinder with the bar, or handle, or other human/machine interaction
points. Particular emphasis will be placed on mechanical designs appropriate for
tests conducted in the restricted dimensions of reduced-g and zero-g
workspaces. More extensive software attributes will be developed during Phase II
as well. The developed product will be directed for use on shuttle flights, for a
future space station, for lunar or Mars colonization, and for use as a
measurement tool in the NASA research testing programs, such as examining
neuromuscular forces, muscular strength, conditioning and deconditioning,
habitat facilities, EVA studies, and others. Subsequent commercial use seems
particularly applicable in instances where physical space is limited.
3. PHASE I WORK PLAN
The most important goal of the Phase I efforts is the production of adequate
software on an appropriate portable, battery-powered computer to demonstrate
the operational capabilities of the proposed dynamometer project successfully
and sufficiently. An acceptable portable computer will be attached to an existing
hydraulic pack and cylinder unit with an attached bar. The position and force
transducers will provide the input signals through the Controller board. A simple
experimental study will be conducted to compare force results registered by the
dynamometer with those simultaneously secured on a force plate. The following
presentation more fully describes the details for each of the essential
components.
a. Computer.
The physical characteristics of the computer are of paramount importance in the
microgravitional workspaces where the proposed dynamometer project is
targeted for ultimate use. The dynamometer must be able to obtain force
measurements, throughout a range of movement, as well as to provide a means
of controlling the velocity or the resistance generated by the user. The
performance criteria of the proposed dynamometer necessitate rapid computer
processing speed, adequate memory, and rapid analog to digital conversions.
The computer must be portable, as light-weight as possible, possess graphics
display capability, and it must function on its own battery power which will
eliminate any need for shuttle power. To insure sufficient speed, the computer
must have an 80386SX or higher processor which has an Industry Standard
Architecture (ISA) bus. It is anticipated that four (4) megabytes of memory will be
sufficient for Phase I. Both a hard disk and at least one other storage medium,
such as a floppy disk, are essential to ensure preservation of data, particularly
that secured during zero-g missions. Compatibility with an external signal
processing board is required. In Phase I only, the use of an expansion chassis to
house this external board may be necessary but is not anticipated. A currently
available customized Controller board will be used during the Phase I feasibility
study. Any modification of this board for Phase I uses will be minor.
Because of the compactness of design and the ability to operate with a single
monitor, either with or without a "Windows" environment, it is anticipated that
one of the "laptop" computers will be selected for the proposed project. Because
of the rapidly changing technologies in the commercially available computer
hardware, selection of the specific computer to be used in Phase II will be
postponed until that time. The computer selected for Phase II will be required to
have provisions for an internal expansion slot for inclusion of a specially
designed Controller board.
b. Controller Board.
The Controller board consists of specialized electronics which will perform
analog-to-digital (A/D) conversions of the input signals received from both the
position and the force transducers. Analog input signals are the standard
characteristic of these sensory devices. The Controller board also has the
appropriate electronics for controlling and powering the resistive mechanism of
the dynamometer. Processing of the two analog input devices as well as
transmission of the subsequent software generated digital signal to regulate the
stepper motor attached to the hydraulic valve and cylinder unit must be rapid and
precisely regulated for accurate and smooth performance results.
The Controller board utilized for the Phase I dynamometer will be an existing
customized board and any modifications will be minor. However, a specialized
board will be developed for the Phase II dynamometer product. The Controller
board connects to the ISA bus of the computer, which powers both the controller
board and the dynamometer. This is a very ambitious plan which requires that the
Controller board be designed to require an absolute minimum of power so that
the computer's batteries are not overly taxed. A worse case scenario would
require that an additional, separate battery supply be incorporated into the design
in Phase II. However, the additional battery would not appreciably increase the
weight nor necessiate shuttle power. Further enhancements under consideration
for Phase II include providing additional optional channels for securing EMG,
heart rate, EKG, blood pressure, and/or other analog signal data.
c. Dynamometer Frame Mechanism.
In Phase I, an existing frame will be utilized for testing the proposed computer
and software developed. In Phase II, a dynamometer frame will be developed
which is compact and light-weight with a target weight of less than 10 kilograms.
This is an ambitious design goal which will require frame materials to have
maximum strength-to-weight ratios and the structure must be engineered with
attention directed towards compactness, storage size, and both ease and
versatility of operation. An additional consideration during Phase II development
is to have the entire system readily adaptable to flight specifications.
d. Force and Position Transducers.
Existing transducers available commercially will be utilized for the proposed
Phase I dynamometer project. The function of these input devices is to supply
information to the computer relative to the location of the bar or handle against
which the individual is exerting force as well as the amount of that force. This
information must be provided rapidly enough for the computer to process the
input signal and respond with an adjustment, if needed, to the hydraulic valve
assembly so that the internal response adjustments are undetectable by the
individual using the device. A characteristic essential to the proposed
dynamometer is that the individual exerting force perceives only smooth
operation and is insulated from any detection of hardware and/or functional
adjustments. The continual exchange of data between input sensors and the
regulation of the hydraulic system is one of the most crucial segments of the
software programs to be prepared during the Phase I portion of the product
development.
e. Hydraulic Valve, Pack, and Cylinder Unit and Stepper Motor.
An existing hydraulic valve, pack, and cylinder assembly which is currently
integrated with an existing, commercially available stepper motor will be modified
for use in the Phase I project. A stepper motor is attached to a hydraulic valve
assembly which opens and closes an orifice regulating the flow of hydraulic fluid,
thus controlling the amount of force needed to push or pull the piston within the
cylinder. Since the main thrust of Phase I is to develop sufficient software
capabilities on a portable, battery-powered computer to demonstrate the ability to
measure and store forces, the development of a specialized hydraulic device with
its related valve controls will be postponed until Phase II.
During Phase II, the design of a smaller and lighter hydraulic valve, pack, and
cylinder assembly is envisioned. A further consideration is to use a flight-
qualified fluid which would be more appropriate for microgravitational locations,
such as in the shuttle or space station. Consideration of alternative resistive
mechanisms have been abandoned because of the limitations imposed in zero-g
conditions. Weight-based devices would have no value under reduced-g or zero-g
conditions. Pneumatic resistance was rejected because of the pressure
requirements, the problems associated with compressibility of gases, the
difficulties associated with accuracy and calibration of measurements, and the
need for pressurized cylinders. Hydraulic mechanisms are less affected by
gravitational forces, can be regulated by low voltage, battery powered devices,
can operate in both up and down stroke directions, and can function passively.
Consideration of an "active" hydraulic system, which would provide conditions in
which the individual would have to resist forces generated by the dynamometer,
were rejected for the following reasons: (1) user safety, (2) decision against
employing any motorized devices within zero-g workspaces for environmental
safety considerations, and (3) more than sufficient and adequate results are
obtainable with "passive" mechanisms.
f. Software.
Since one of the primary objectives in Phase I of the proposed dynamometer
project is both to assess force levels throughout a range of motion and to provide
a mechanism for conditioning, the initial software efforts will concentrate on this
task. The software for the proposed dynamometer project must be capable of
performing a variety of measurements as well as controlling repetitive
movements and storing the generated data. Control of the hardware must be
rapid and accurate to ensure smoothness of response. There must be appropriate
means to interact with the individual and to access the resulting data. The
proposed software developments should be considered on two levels. One level
of software will be invisible to the individual using the dynamometer device since
it will control the various hardware components. The second level of software will
allow user/computer interaction. The computer programs necessary to provide
the real-time feedback control, the data program and storage, and the additional
performance manipulations will be extensive. A large portion of the software for
the proposed project currently exists but operates on a larger and faster
computer system. Although the proposed project constrains the software to
provide smooth, feedback-controlled operation with a smaller, less powerful
computer, new or revised programming code will be completed by the
appropriate personnel within the time frame allocated in Phase I.
The software which provides computer interaction with the individual operator
should automatically present a menu of options when the dynamometer system
is activated. The menu will include at least four options: (1) diagnostics, (2)
controlled velocity, (3) controlled resistance, (4) controlled work. In all cases,
motion will be regulated in both directions, that is, when the bar moves up and
down. Each of these four options will be briefly described in the following
sections. In Phase I, the exercise selected for use will be restricted to a standing
vertical leg extension task and the descriptive sections are oriented from this
frame of reference.
Selection of the diagnostics option will allow several parameters about that
person to be evaluated and stored if desired. The diagnostic parameters will be
the range of motion, the maximum force, and the maximum speed that the
individual can move the bar for the specific Phase I test activity selected. The
maximum force and maximum speed data will be determined at each discrete
point in the range of movement as well as the average across the entire range.
The diagnostic data could be used solely as isolated pre- and post-test
measurements. However, the data can also be stored within the person's profile
so that subsequent actions and tests performed on the dynamometer can be
customized to adjust to that specific individual's characteristics.
The controlled velocity option will permit the individual to control the speed of
bar movement. The pattern of the velocity will be determined by the person using
the equipment and these choices of velocity patterns will include: (1) isokinetic,
which will provide a constant speed throughout the range of motion; (2) variable
speed, in which the speed at the beginning of the motion and the speed at the
end of the stroke are different with the computer regulating a smooth transition
between the two values; and (3) programmed speed, which will allow the user to
specify a unique velocity pattern throughout the range of movement. For each of
the choices, determination of the initial and final velocities will be at the
discretion of the individual through an interactive menu. The number of
repetitions to be performed will also be indicated by the person. It will be possible
to designate different patterns of velocity for each direction of bar movement.
The controlled resistance option will enable the person to control the resistance
or amount of force required to move the bar. The alternatives will include: (1)
isotonic, which will provide a constant amount of force for the individual to
overcome in order to move the bar; (2) variable resistance, in which the force at
the beginning of the motion and the force at the end of the movement are
different with the computer regulating a smooth transition between the two
values; (3) programmed resistance, which will permit the individual to specify a
unique force pattern throughout the range of movement. An interactive menu will
enable the person to indicate the precise initial and final values, the number of
repetitions to be used, and each direction of bar motion will be independently
programmed for each of the three choices.
The controlled work option will allow the individual to determine the amount of
work, in Newton/meters or joules, to be performed rather than the number of
repetitions. In addition, the person will be able to choose either velocity or
resistance as the method for controlling the bar movement. As with the previous
options, bi-directional control will be possible.
The data storage capability will be useful in the design of research protocols. The
software will be designed to allow an investigator to "program" a specific series
of exercises and the precise manner in which they are to be performed, e.g.
number of repetitions, amount of work, etc., so that the astronaut need only
select his or her name from the graphic menu and the computer will then guide
the procedures. Data gathered can be stored for subsequent analysis. The
proposed dynamometer will have the capacity to "program" a sequence of
events, such as a series of different exercises; determination of that sequence
will be solely at the discretion of the research investigator or other user. Data
storage will be presented as an option; it will not be a required mode of operation.
The proposed dynamometer will be fully operational for all options irrespective of
whether the data storage option is activated.
In Phase I, control of the dynamometer will be through graphic menu displays
and keyboard input by the individual for option selection and determination of
information, such as velocity, resistance, work, and other necessary values.
While the person pushes up and pulls down on the bar, both graphic and audio
cues will be provided to indicate the current amount of force generated, the
repetition number, and the location of the bar. In Phase II, computer/human
interface via a mouse, trackball, or any acceptable pointing device rather than
through the keyboard, more extensive graphics, and additional options are
anticipated.
More extensive software enhancements will be developed in Phase II. For
example, the ability to challenge the individual by placing a target on the graphic
display. The person will then try to "hit" the target through greater effort. A
"Fatigue" mode will be developed. This will allow the person to specify a
decrement level so that when the performance deteriorates to that level, the
computer will terminate the exercise. This may be a particularly important feature
for use on rigorous missions. For those crew members involved in exhaustive
work, such as extended EVA activities, computer intervention at a prescribed
fatigue level may prevent undesirable overexertion yet allow sufficient exercise
performance.
g. Calibration.
Accuracy of measurement is essential and it is deemed as one of the most
important considerations in the software development. Calibration of the
proposed dynamometer will be possible under dynamic conditions and is a
unique feature that the computerization and the feedback system will allow.
Calibration will be performed using weights with known values. The actual
calibration procedure will allow the individual to place known weights at the
starting position and, when released, force data will be sampled until the ending
position is reached. The calibration procedure will be performed in both up and
down directions. This type of calibration is unique in that the accuracy of the
device can be ascertained throughout the range of motion. Restrictions of size
and locations in the shuttle and space stations as well as the difficulties
associated with weightlessness will necessitate an additional type of calibration
for consideration in Phase II.
h. The Experimental Study.
An experimental study will be conducted to determine the functionality of the
proposed device. As the Phase I goals are to select a portable, battery-powered
computer and develop appropriate software on it, the study will be restricted to
determining whether the Subjects can perform each of the four options
previously described for one specific activity. The activity will be a squat exercise
which is a standing knee extension/flexion motion.
i. The apparatus.
The equipment will consist of the computer and its operational software to be
attached to an existing device suitable for performance of the squat exercise. The
existing device has a hydraulic valve and cylinder attached to a bar which is both
long enough and devised in a manner to accommodate this activity. The analog
sensors and the digital control of the hydraulic stepper motor will be
electronically interfaced with the computer through the previously discussed
Controller board.
ii. The population.
Eight normal male subjects will be selected. The subjects will range in age from
25 to 45 and be of average height and weight. Subjects will be healthy and free of
any physical disability.
iii. The protocol.
Each Subject will be tested on one day for approximately one hour with a ten
minute break between each of the four menu options. A brief familiarization
process will precede the test. A test will consist of performing the squat exercise
for each of the four options; that is, diagnostics, controlled velocity, controlled
resistance, and controlled work. All tests will begin with the diagnostic option.
The order of the remaining three options will be varied to reduce any effects of
learning but the Subjects will be randomly assigned to each of the specific
procedures.
The diagnostic option will consist of one trial of each of the following (1)
maximum range of motion, (2) maximum velocity, and (3) maximum force for each
Subject. The controlled velocity option will use an isokinetic type of exercise
beginning at 20 degrees per second and ending at 35 degrees per second. This
speed and type will be used only in the up directions. For the down direction, the
speed will be set at 100 degrees per second for the entire range. The controlled
resistance option will be an isotonic type of exercise. Using the diagnostic
results, the assigned resistance will be 75% of each person's maximum
throughout the entire exercise movement in the upward direction. The resistance
setting for the down direction will be set at 10 percent of the individual's
maximum as determined in the diagnostic phase. The controlled work option will
specify the amount of work as 7500 Newton/meters and will use the controlled
velocity mode as the type of exercise.
i. Evaluation and Results.
The ability to perform the specified tests by the Subjects while interacting with
the proposed computer and its software will determine the success or failure of
the proposed project. A questionaire will be completed by each Subject
concerning the tasks, the success of operation, and other pertinent information.
Data gleaned from the questionaire will be valuable in determining the operational
success of the proposed project.
j. Work Site.
All of the developmental and test work previously described will be conducted at
Computerized Biomechanical Analysis, Inc., the applicant site. This includes the
software development on the selected computer and the experimental study. All
necessary equipment is currently available on site.
k. Timetable and Personnel.
Dr. Gideon B. Ariel, the principal investigator; Dr. M. Ann Penny, an exercise
scientist with expertise in neuromuscular integration; Dr. Jeremy Wise, a
software engineer; a TBA programmer; Mr. John D. Probe, a mechanical
engineer; Dr. Ruth A. Maulucci, an information scientist with expertise in human
performance and rehabilitation; and Dr. Richard Eckhouse, Jr., an electrical and
computer engineer are the personnel who will perform the work. The specific
tasks to be accomplished, the key person responsible, and the time for
completion are outlined below:
Task 1. Choose the computer; Ariel, Wise, and Eckhouse; month 1.
Task 2. Software development; Wise, TBA, supervised by Wise, and
Eckhouse; months 1, 2, and 3.
Task 3. Arrange experimental apparatus; Penny, Probe, and Maulucci;
month 3.
Task 4. Recruit subjects; Penny; month 3.
Task 5. Modify and/or debug software; Wise and Ariel; month 4.
Task 6. Perform experimental study; Penny, Probe, and Maulucci;
month 5.
Task 7. Prepare final report; Ariel and Penny; month 6.
4. RELATED RESEARCH OR R&D
a. Recent Developments by Others.
The ability to assess strength and/or to exercise has occupied centuries of
thought and effort. Since Milo the Greek lifted a calf each day until the baby grew
into a bull, humans have attempted to provide suitable means to determine
strength levels and ways to develop and maintain conditioning. However, most
exercise equipment is gravity dependent and, therefore, would be ineffective in a
weightless environment. Space flight exercise devices have been similar in
design and function with many earth-bound devices but have been adapted for
reduced-g applications. These devices include treadmills, bicycle ergometers,
rowing machines, and other equipment. For purposes of this proposal, attention
will be restricted to equipment utilized or proposed for use on shuttle missions
and those most recent developments commercially available.
Treadmills have been used on all Russian Salyut space stations, Skylab 4, and
Shuttle orbitors [3]. The treadmill currently used as standard exercise equipment
on shuttle missions was designed in 1974 [9]. The rolling tread is coupled to a
flywheel, brake, and tachometer using pulleys and belts. Speed may be varied at
different levels by a rapid onset centrifugal brake. The astronaut provides earth
equivalent body weight loading by adjusting a harness and rubber bungee cord
arrangement. The treadmill is a passive device so that movement is produced by
the astronaut leaning forward and pushing with the legs in a manner similar to
running uphill on Earth. The treadmill models used on Skylabs 3 and 4 provided
leg forces higher than those produced on a bicycle ergometer, but were below an
adequate level demanded for return to 1-g [3]. There are no provisions for
regulation nor recording of strength performance data with any of the treadmill
units.
Bicycle ergometers have been utilized on shuttle, Skylab, and Russian
spacecraft. The U.S. models employ a seat for support in 1-g environments with
the head and arms providing counterforces in zero-g settings [9]. On Skylab, the
bicycle ergometer was used to provide a quantitative stress level for studies of
physiological response as well as the primary off-duty crew exercise apparatus
[10,11]. Results from Skylab 2 indicated that while aerobic exercise and
cardiorespiratory conditioning could be met through bicycle ergometer in-flight
use, sufficient leg strength could not be maintained for 1-g needs [3]. Although
the bicycle ergometer models previously used could be controlled by the
astronaut's heart rate, manually, or by computer, strength and/or exercise data
were not regulated nor was such data preserved.
Other types of exercise devices for space flight use have been considered. A
flight qualified rowing machine is awaiting flight opportunity. This equipment
provides foot restraints, since seats are unnecessary in weightlessness, and a
cable with handles replaces the oars. Six discrete loads are provided. An internal
NASA study found that the rower provided moderately heavy arm and back, but
relatively small leg force loads [9]. A "body weight load for isotonic exercise"
device employs spring tension to replace the force of the human body in 1-g
environments [9]. Using a harness and pulleys, various isotonic exercises such
as dips, squats, and chin ups can be performed on this apparatus. Another flight
certified device is an isometric dynamometer [9]. The dynamometer utilizes a
stain gauge torque element to measure maximal bidirectional isometric shoulder,
elbow, knee and hip strength. A stationary locomotion apparatus makes use of a
body harness and elastic bungee cords allowing walking, jogging, or jumping in
place under a constant load [9]. None of the equipment mentioned above
provides either for the regulation of exercise protocols nor the ability to record
those parameters.
A plethora of exercise devices exist for earth-bound use ranging from simple
cables, pulleys, and springs through more complex apparatus employing motors,
air, hydraulics, etc. For example, various Cybex models provide hydraulic
resistance and enjoy widespread use particularly in rehabilitation. However, the
equipment provides non-varying isokinetic motion, cannot be calibrated
![]() dynamically, uses A/C power, requires high current, and is large. A Cybex model
dynamically, uses A/C power, requires high current, and is large. A Cybex model
has been used on NASA's KC-135 aircraft and in the Weightless Environmental
Training Facility (WETF) but would seem to be inappropriate for
microgravitational sites for many of the reasons mentioned. The Ariel
Computerized Exercise equipment provides feedback controlled variable speed
functions, but requires A/C power and is too large for spacecraft applications.
In summary, all earth-based equipment are inappropriate for microgravitational
use for one or more of the following reasons: (1) function only in normal
gravitational environments, (2) use motors, need A/C power, require high current,
and/or generate excessive heat, and (3) have excessive weight and/or are
prohibitively large in size for use in the confined areas found on spacecraft or
Space Stations.
b. Significant Research Conducted by the Principal Investigator.
Dr. Gideon B. Ariel, the principal investigator for this proposed device, has
designed equipment for testing and exercising humans, has developed
computerized software products, and has designed, developed, and
manufactured computerized exercise equipment. The unique amalgamation of
academic and professional expertise in human performance, mechanics, and
computers are evident in the research and products developed by Dr. Ariel. The
hallmarks of his research and the products he has developed are accuracy,
quantification, and practicality.
Dr. Ariel had extensive experience in physical fitness and conditioning as an
athlete, while participating in two Olympic Games, and in his early academic
preparation. In the early 1970s, Dr. Ariel conducted studies assessing human
performance criteria and, in addition, produced the first studies on anabolic
steroids using trained athletes as Subjects . His findings revealed that
statistically significant strength gains resulted from ingestion of an anabolic
steroid, and these increases were not merely a placebo effect. Other publications
presented results on exercise, training, and athletic performances.
While studying biomechanics in graduate school, Dr. Ariel recognized the lack of
and the need for a system to quantify human motion. After receiving his doctoral
degree, he combined his biomechanical training with his knowledge of computer
programming guiding his small staff in the development of a computerized
analysis system. This biomechanical analysis system was based upon Newtonian
equations and produced the three-dimensional coordinates of the joints centers
of a body. The computerized hardware/software system provided a means to
objectively quantify the dynamic components of athletic events replacing mere
observation and supposition. For approximately ten years, Dr. Ariel worked with
numerous corporations, primarily in product assessment and their subsequent
modifications. In addition, he worked closely with the United States Olympic
Committee in the quantification of various athletic events and established the
biomechanics laboratory at the U.S. Olympic Training facility in Colorado
Springs, Colorado. Based upon this foundation of business experiences,
programming skills, and awareness of the computer industry's rapid evolution
from large main frames to mini and micro computers, Dr. Ariel has guided the
development of his computerized motion analysis system into a product available
commercially.
The invention of an computerized exercise machine was a natural evolution of Dr.
Ariel's personal and academic investigations into physical conditioning, motion
analysis, computers, and electronic as well as his knowledge of available, non-
computerized exercise equipment. Currently three of Dr. Ariel's patented
computerized exercise devices are marketed commercially.
c. Bibliographic References In Support of the Proposal.
[1] Squires, W.G., Tate, C.A., Raven, P.B., Vailas, A.C., Morgan, W.P. and Bishop,
P.A. "Final report - exercise countermeasures project." Prepared by the Discipline
Implementation Team, Johnson Space Center, Submitted October, 1990.
[2] Thornton, W. and Rummel, J. "Muscular deconditioning and its prevention in
space flight." In: Biomedical Results from Skylab, Chapter 21. Ed. R. Johnston
and R. Dietlein. Washington, D.C. NASA, 1977.
[3] Greenisen, Michael C. "Mechanics, impact loads, and EMG analyses of
locomotion on the shuttle treadmill." NASA DSO Program document. Submitted,
Feb. 2, 1990.
[4] Dudley, G. and Fleck, S. "Strength and endurance training: Are they mutually
exclusive?" Sports Medicine, Vol. 4: pp. 79-85, 1987.
[5] McDonaugh, M. and Davies, C. "Adaptive response of mammalian skeletal
muscle to exercise with high loads." European Journal of Applied Physiology,
Vol. 52: pp. 139-155, 1984.
[6] Michel, E.L., Rummel, J.A., Sawin, C.F., Buderer, M.C., and Lem, J.D. "Results
of Skylab medical experiment M171: Metabolic activity." In: Biomedical Results
from Skylab. Chapter 36. Ed. R. Johnston and R. Dietlein. Washington, D.C.
NASA, 1977.
[7] Walker, J., Greenisen, M., Cowell, L.L., and Squires, W.G. "Astronaut adaption
to 1 G following long duration space flight." Presentation at the 21st International
Conference on Environmental Systems sponsored by the Engineering Society for
Advancing Mobility Land Sea Air and Space, San Francisco, CA, July, 1991.
[8] Rummel, J.A., Michel, E.L., Sawin, C.F., and Buderer, M.C. "Metabolic studies
during exercise: the second manned mission." Aviation, Space, and
Environmental Medicine, Vol. 47: pp. 1056-1060, 1976.
[9] Thornton, W. "Status review of flight exercise hardware, Johnson Space
Center 1990". NASA document. October 15, 1990.
[10] Johnson, R.S. "Skylab medical program overview." In: Biomedical Results
from Skylab. Chapter 1. Ed. R. Johnston and R. Dietlein. Washington, D.C. NASA,
1977.
[11] Moore, T.P. "The history of in-flight exercise in the U.S. Manned Space
Program." Proceedings of NASA sponsored Workshop on Exercise Prescription
for Long-Duration Space Flight, Houston, Texas, 1989.
5. RELATIONSHIP WITH PHASE II OR OTHER FUTURE R/R&D
The ultimate result envisioned from the proposed project is a computerized,
feedback-controlled, portable, battery-powered, hydraulic dynamometer which
can be used in earth- and microgravitational environments. Phase I addresses
only one of the essential components, namely the feasibility of using a portable,
battery-powered computer and implementing operational software for earth-fixed
use. During Phase II, attention will be extended to several areas including: (1)
developing a specialized Controller board which will fit within the designated
computer and will be enhanced to allow additional analog input devices; (2)
designing a frame which will be light-weight and compact. Special attention will
focus on versatility in order to maximize the number and variety of exercises; (3)
selection of a portable computer with provisions for an internal expansion slot for
inclusion of the Controller board; (4) design of a smaller and lighter hydraulic
valve, pack, and cylinder assembly with consideration for use of flight qualified
materials; (5) extensive software development will include more extensive
graphics, data storage and evaluation features, different exercise options, such
as a "performance target" and "fatigue" modes, and optional computer/operator
interface devices, such as a mouse, trackball, or other pointing device; and, (6)
consideration of calibration procedures in zero-g conditions.
6. POTENTIAL COMMERCIAL APPLICATIONS
The proposed equipment has commercial potential for use in any restricted-
space area, such as submarines, homes, offices, and many medical and
rehabilitative facilities. Another important feature of commercial value is the
portability of the device which could expand the service opportunities for
therapists in the areas of physical and occupational rehabilitation. The ability to
transport a compact, portable exercise device to a patient's location within a
hospital or convalescent facility would enhance on-site therapeutic procedures.
This could be particularly important for those individuals whose immobility would
prohibit receipt of such services.
Commercialization of products emerging from research conducted at
Computerized Biomechanical Analysis, Inc. is of interest to the company.
Currently, the corporation derives royalties from previous research efforts and
will aggressively pursue the marketing of the device proposed for this grant.
Spin-off products based on the proposed equipment may be appropriate for
children as well as for the elderly. During Phase I, contacts will be initiated to
determine interest in Phase III commercialization of the proposed Computerized
Portable Dynamometer.
7. COMPANY INFORMATION
Computerized Biomechanical Analysis, Inc. was established in 1971 to quantify
human (the "Bio") movement using the Newtonian equations of motion (the
"mechanical"). Many of the early research investigations involved product
assessment and design improvements for sporting goods companies, including
golf balls and clubs, tennis rackets and balls, skis and ski boots, basketballs,
softballs, as well as the shoes and apparel of various sports. Primary
consideration was given to task analysis and performance expectations
developed from quantification of empirically secured activity data. Subsequent
product developments, improvements, and/or modifications were derived from
actual human performance characteristics rather than estimated needs or current
fads. Additional biomechanical studies include studies of violin performances,
ballet, feminine hygiene products, feline and equine locomotion, hand writing,
and numerous forensic investigations posed both by defense and prosecution. In
addition, a major software project was sponsored by IBM.
The company and its staff have demonstrated their expertise in devising and
conducting research inquires under vendor contract dictates as well as in
independent, in-house initiatives. Project management begins with problem
identification, proceeds through experimental formulation, data collection and
reductions, interpretation of results, and formulation of prototypes, where
needed, or of product alteration recommendations. The researchers at
Computerized Biomechanical Analysis, Inc. possess the academic credentials
and creative imaginations as illustrated in their individual and collective abilities
at performing innovative tasks. In addition, understanding and enhancing human
performance is a special interest of the company and each of its employees.
Extensive computer and peripheral hardware are available to the research
scientists at Computerized Biomechanical Analysis, Inc. Computer systems
currently in use include IBM models XT's and AT's, AST models 286, 386, and 486,
Toshiba models T1600/40, T5100, and 1000SE. Monochrome and color, both EGA
and VGA, monitors are utilized for different applications. Color, near-letter quality,
and laser printers are available. A variety of languages are available to program
developers so that each project can be executed in the most efficient and
appropriate language for the specific need. Commercial application software
programs including word processors, spreadsheets, data base managers,
CAD/CAM, AutoCad, and graphic designs are frequently used for data reductions,
for enhanced report presentations, and specialized board and product design and
layout.
Ancillary hardware includes Kistler, AMTI, and Bertec force platforms, preamped
electrodes for EMG data acquisition, and video cameras for motion analysis.
Special customized software was developed at Computerized Biomechanical
Analysis, Inc. for data collection, storage, and processing.
8. KEY COMPANY PERSONNEL
CURRICULUM VITAE
GIDEON B. ARIEL, Ph.D.
EDUCATION
Ph.D. Exercise Science University of Massachusetts 1969-72
M.S. Exercise Science University of Massachusetts 1966-68
B.S. Physical Education University of Wyoming 1963-66
D.P.E. Physical Education Wingate College (Israel) 1958-60
AFFILIATIONS
United States Olympic Committee; Chairman and
founder of Biomechanics Committee for Sports
Medicine, 1976-84
Adjunct Professor - Hahnemann Univ., 1977-present
Adjunct Professor - University of California-Irvine,
Department of Neurology, 1979-present
Adjunct Professor - University of Massachusetts, 1974-76
Assistant Professor - University of Massachusetts, 1972-75
Post Doctorate Research Associate-University of Massachusetts, 1974-76
Instructor - University of Massachusetts, 1968-70
Research and Teaching Assistant - University of Massachusetts, 1967-72
BUSINESS EXPERIENCES
Computerized Biomechanical Analysis, Inc. - Founder
and Vice President, 1971-present. A corporation
dedicated to innovative research and product
development.
Ariel Dynamics, Inc. - Founder and President, 1981-
present. A corporation to manufacture and market
exercise equipment. Minimal activity currently due to
licensing agreement with Ariel Life Systems, Inc.
Ariel Performance Analysis, Inc. - Founder and
President, 1986-present. A corporation to manufacture
and market motion analysis equipment. Minimal activity
currently due to licensing agreement with Ariel Life
Systems, Inc.
Ariel Life System, Inc. - Founder and President, 1990-
present. A corporation to manufacture and market
exercise equipment and motion analysis system.
PATENTS
1. Variable resistance exercising device. No. 665,459, March 17, 1981.
![]()
![]() 2. Programmable variable resistance exercise. No.
2. Programmable variable resistance exercise. No.
4,354,676, October 19, 1982.
3. Passive programmable resistance device. No.
4,544,154, October 1, 1985.
SELECTED PUBLICATIONS
Ariel, G.B. "The effect of knee joint angle on Harvard
Step Test performance." Ergonomics, Vol. 12: pp. 33-37,
1969.
Ariel, G.B. "Effect of anabolic steroids on reflex
components." Journal of Applied Physiology, Vol. 32:
pp. 795-797, 1972.
Ariel, G.B. and Saville, W. "Anabolic steroids:
physiological effects of placebos." Medicine and
Science in Sports, Vol. 4: pp. 124-126, 1972.
Ariel, G.B. "The effect of anabolic steroid upon skeletal
muscle contractile force." Journal of Sports Medicine
and Physical Fitness, Vol. 13: pp. 187-190, 1973.
Ariel, G.B. "Computerized biomechanical analysis of
human performance." In: Mechanics and Sport, The
American Society of Mechanical Engineers, Vol. 4: pp.
267-275, 1973.
Ariel, G.B. "Computerized biomechanical analysis of the
knee joint during deep knee bend with heavy load." In
Biomechanics IV. Edited by R.C. Nelson and C.A.
Morehouse, Fourth International Seminar on
Biomechanics, Pennsylvania State University, 1973.
Ariel, G.B. "Prolonged effects of anabolic steroid upon
muscular contractile force." Medicine and Science in
Sports, Vol. 6: pp.62-64, 1974.
Ariel, G.B. "Shear and compression forces in the knee
joint during deep knee bend." In: XXth World Congress
in Sports Medicine Handbook, Melbourne, Australia,
1974.
Ariel, G.B. "Method for biomechanical analysis of human
performance." Research Quarterly, Vol. 45: pp. 72-79,
1974.
Ariel, G.B. "Computerized biomechanical analysis of
athletic shoe." Vth International Congress of
Biomechanics Abstracts, Jyvaskyla, Finland, pp. 5,
1975.
Ariel, G.B. "Computerized biomechanical analysis of
human performance." In: Biomechanics of Sport. Ed.
Thomas P. Martin, State University of New York at
Brockport, pp. 228-229, 1975.
Ariel, G.B. and Maulucci, R.A. "Neural control of
locomotion - a kinetic analysis of the trot in cats." In:
Neural Control of Locomotion. Ed. R.M. Herman, et.al.,
Plenum Publishing Corp., pp. 759-762, 1976.
Ariel, G.B. "Elementary biomechanics." In: Therapeutics
Through Exercise. Ed. D.L. Lowenthal, et.al., Grune and
Stratton, pp. 99-102, 1979.
Ariel, G.B. "Human movement analysis." Applied
Ergonomics, Vol. 11: pp. 61-62, 1980.
Ariel, G.B. "Resistive Training." Clinics in Sports
Medicine, Vol. 2 (1): pp. 55-69, 1983.
Ariel, G.B. "Biofeedback and biomechanics in athletic
training." In: Biofeedback and Sports Science. Ed. J.H.
Sandweiss and S.L. Wolf, Plenum Publishing Corp., pp.
107-145, 1985.
Ariel, G.B. "Body Mechanics." In: Injuries to the
Throwing Arm. Ed. B. Zarins, J.R. Andrews, and W.G.
Carson, W.B. Saunders, Co., pp. 3-21, 1985.
Ariel, G.B. "Biomechanics of exercise fitness." In:
Encyclopedia of Medical Devices and Instrumentation.
Ed. J.G. Webster, John Wiley & Sons, pp. 387-392, 1988.
Ariel, G.B. "Biomechanics." In: Scientific Foundations of
Sports Medicine. Ed. Carol C. Teitz, B.C. Decker, Inc.
Chapter 12, pp. 271-297, 1989.
Dr. Gideon B. Ariel, the principal investigator for the proposed project, is the Vice
President and founder of Computerized Biomechanical Analysis, Inc. Dr. Ariel is
employed full time at Computerized Biomechanical Analysis, Inc. and will
continue in this capacity during the Phase I and Phase II periods encompassed
by the proposed project. Currently, he has allocated no time commitments for
other projects in which he would function as the principal investigator during the
Phase I and II portions of the proposed project.
CURRICULUM VITAE
M. Ann Penny, Ph.D.
EDUCATION
Ph.D. Exercise Science University of Massachusetts 1973-77
M.S. Exercise Science University of Massachusetts 1968-73
B.S. Health and Phys- University of North Carolina 1962-66
ical Education
BUSINESS EXPERIENCES
President-Computerized Biomechanical Analysis, Inc. 1974-present
Vice President and Treasurer-Ariel Dynamics, Inc. 1981-present
Vice President and Treasurer-Ariel Performance
Analysis System, Inc. 1986-
present
RESEARCH EXPERIENCES
Confidential and/or proprietary research was the primary corporate involvement
and, thus publications based on studies conducted by Dr. Penny were severely
restricted. In the role of primary or co-investigator, the following representative
sample of research investigations conducted by Dr. Penny includes: (1) feminine
hygiene products, (2) feline and equine locomotion, (3) specialized forensic
projects related to product liability, (4) quantification of numerous Olympic
athletic events, and (5) extensive product evaluation and subsequent design
specification. Her participation and involvement began at project inception,
continued through data collection, and culminated with the preparation of the
final report. Her insight, academic preparation, and efforts were, and continue to
be, invaluable and irreplaceable.
PUBLICATIONS AND PRESENTATIONS
Wolf, S. L., Ariel, G. B., Saar, D., Penny, M.A., and Railey,
P.A. "The effects of muscle stimulation during resistive
training on performance parameters." American Journal
of Sports Medicine, Vol. 14(1): pp. 18-23, 1986.
Ariel, G.B., Saar, D., and Penny, M.A. "A computerized
formation analysis of the women volleyball world cup
championship in Japan, 1981." presented at American
College of Sports Medicine conference, Montreal,
Canada, May, 1983.
Saar, D., Ariel, G.B., Penny, M.A., and Saar, I. "Aerobic
adaptation to work and fatigue training modes on the
computerized exercise system." In: New Horizons of
Human Movement, Vol. 3: pp. 171, Seoul Olympic
Scientific Congress, Korea, 1988.
Ariel, G.B., Penny, M.A., Saar, D., and Railey, P.A.
"Cardiovascular and muscular adaptation to training
utilizing a computerized feedback-controlled modality."
In: New Horizons of Human Movement, Vol. 3: pp. 167,
Seoul Olympic Scientific Congress, Korea, 1988.
Ariel, G.B., Penny, M.A., Saar, D., and Selinger, A.
"Computer-controlled strength training program for the
U.S. national women's volleyball team." In: New
Horizons of Human Movement, Vol. 3: pp. 171, Seoul
Olympic Scientific Congress, Korea, 1988.
Ariel, G.B., Saar, D., Wolf, S., Penny, M.A., and Railey,
P.A. "The effects of muscle stimulation during dynamic
resistive training on performance parameters." In: New
Horizons of Human Movement, Vol. 3: pp. 162, Seoul
Olympic Scientific Congress, Korea, 1988.
CURRICULUM VITAE
JEREMY WISE, Ph.D.
EDUCATION
Ph.D. Physics University of Massachusetts 1972-78
B.S. Physics Cornell University 1964-69
PUBLICATIONS
Jensen, D. Kreisler, M., Lomanno, F., Poster, R., Rabin,
M., Smart, P. Wise, J, and Dakin, J. "A Computer
Controlled Pulser System." Nuclear Instruments and
Methods, 1980.
Wise, J., Jensen, D., Kreisler, M., Lomanno, F., Poster,
R., Rabin, M., Way, M., and Humphrey, J. "A High
Statistics Study of Lambda Beta-Decay." Bulletin of the
American Physical Society, Vol. 23, No. 4: pp. 546, 1978.
Lomanno, F., Jensen, D., Kreisler, M., Poster, R., Rabin,
M., Way, M., Wise, J., and Humphrey, J. "Measurement
of Polarization in Inclusive Lambda Production at 28.5
Gev/c." Bulletin of the American Physical Society, Vol.
23, No. 4: pp. 600, 1978.
Wise, Jeremy "Holography on a Low Budget." American
Journal of Physics, Vol 40: pp. 1866, 1972.
RESEARCH EXPERIENCES
Dr. Wise has worked for Computerized Biomechanical Analysis, Inc. since 1978
and is currently the Director of Software Development. In addition to his
exceptional computer programming skills, Dr. Wise has academic knowledge and
laboratory experience in physics, high energy physics, mathematics, and
electronics. During his tenure with the applicant corporation, he has been
significantly involved in the development of extensive proprietary software. His
services and his direction of the TBA graduate student programmer for the
proposed project are essential.
9. SUBCONTRACTS AND CONSULTANTS
MOCO, inc., a small business biomedical research firm in Massachusetts, will be
a subcontractor to this proposal (see attached letter of agreement). The company
was established for the purpose of conducting research in human performance
using the principles of mathematics, control theory, and computer and
information science. The scientists at MOCO have performed extensive and
diverse investigations aimed at understanding normal human functioning and at
identifying and explaining abnormal behavior. MOCO, inc. will contribute seven
days of consulting to this project at $300.00 per day. Ruth A. Maulucci, Ph.D. and
Richard H. Eckhouse, Jr., Ph.D., the two principal employees at MOCO, inc. will
serve as the named consultants. No logistic problems are anticipated, since
MOCO, inc. has other projects involving performance sites in Arizona requiring
several visitations during the period covered by this proposal.
Ruth A. Maulucci holds both a Masters and a Ph.D. degree in Computer and
Information Science as well as a Masters degree in Mathematics. Dr. Maulucci is
an information scientist with expertise in human performance and rehabilitation
who has worked and published in the areas of biological signal processing,
feedback and adaptation in the central nervous system, biomechanics and
applications of optimal control theory, and mathematical modeling of biosystems.
Her role in this project will be to advise on the design of the experimental
paradigm and on the methods of feedback training. Her specific qualifications for
this role are as follows. She has developed and is marketing a computerized
workstation consisting of integrated feedback training programs for upper
extremity control and balance. This workstation was developed under a Phase I
and II SBIR grant from the Department of Health and Human Services. She has
conducted a longitudinal experiment to study the maturational kinematic
characteristics of upper extremity movement. In another study, she investigated
the relationships between biomechanical and EMG parameters in normal adult
males. Currently Dr. Maulucci is conducting an empirical study of reaching and
locomotion under a Phase II NASA SBIR grant to determine the characteristics of
the upper and lower extremities pertinent to the design of optimal workspaces for
astronauts.
Richard H. Eckhouse, Jr. holds a Ph.D. degree in Computer Science and a
Masters in Electrical Engineering. With more than 25 years of experience, Dr.
Eckhouse is a nationally recognized authority, particularly in the areas of
computer architecture, operating systems, and physiological instrumentation. He
has worked in academia and industry, and is on the editorial board of several
professional journals. He has published more than 30 articles in refereed journals
as well as written several graduate textbooks which are used internationally. Dr.
Eckhouse will assist in the hardware and software design decisions of this
project.
John D. Probe holds a Masters degree in Engineering in Bioengineering and will
serve as a consultant for the experimental portion of the proposed project. Until
recently, Mr. Probe was employed by Lockheed Engineering and Sciences
Company where he was assigned as an Engineer in the Anthropometry and
Biomechanics Laboratory at the NASA Johnson Space Center in Houston, Texas.
His work at NASA included data collection and analysis for validating NASA's KC-
135 research aircraft for "hyper-gravity" flights utilizing aircraft accelerometers
and a portable data acquisition system; designed, implemented, and supervised
testing in the Weightless Environment Training Facility (WETF) to determine IVA
foot restraint reaction forces for a specified upper extremity workload; and
served as the lead engineer for structural modifications of the Underwater
Dynamometry System to prevent loosening of the dynamometer inside the
waterproofed enclosure following extended use. Mr. Probe will work with Drs.
Penny and Maulucci in preparing the experimental apparatus for the proposed
project as well as assisting Dr. Penny in the experimental data collection. He will
expend ten days effort on the project at $300.00 per day. No logistic problems are
anticipated, since Mr. Probe spends approximately one day a week at the
applicant site. Mr. Probe's employer, Ariel Life Systems, Inc., has agreed to his
participation in the project (see attached letter). There is a close business
relationship between the two corporations since Ariel Life Systems currently
manufactures and markets a product for which Computerized Biomechanical
Analysis holds the patent and, it is anticipated that this company would be
receptive to pursuing the proposed device during Phase III.
Appendix 5 – The Computerized Exercise Machine Patents